We’re happy to share with you TWENTY-EIGHT new standards-aligned lesson plans for teaching with Cubelets. You can take a look at them here, sorted by age. We’ve written 22 more, shown with greyed-out “coming soon” boxes, and we’ll publish the rest of these over the next month as we finish up some image editing and format the lessons for web and print. We just couldn’t wait, though, to publish the first 28.
We designed and tested these lesson plans over the last seven months by partnering with four local teachers. Each of them did amazing work putting the lesson plans together and iterating on them after trying out the lessons with their students. We’re going to be doing a lot more of this! By the way, if you happen to be at the NSTA conference today, please come by our booth and say hi to Beth Cohen, one of our Education Partners, and hear about some recent work she’s done in the classroom modeling biological systems and putting a robotic spin on history lessons…
You’ll see that most lessons are explicitly standards-aligned. Our hope is that this will help you justify your forward-looking work with robot blocks to schools and districts that are mandated to meet standards. We specifically identify the relevant Common Core, Next Generation Science, and ISTE Standards, with Teaching Strategies Gold alignment added for Pre-K and Kindergarten students.
If you get the chance to try out some of these lessons in a classroom, we’d love to hear your feedback.
Last week we launched a Cubelets Operating System update. While the point three makes it sound like a minor update, it’s actually kind of a big deal. OS 4.3 improves a bunch of little things, and it definitively fixes one particularly nefarious bug.
You know how we’re always talking about complexity and emergent behavior? About how Cubelets can be a great model for complex systems we see in the world like societies, ecosystems, and economies? About how play with Cubelets will help kids develop skills to solve problems in complex environments? Well, even though we play with Cubelets a lot around here, sometimes emergent problems in complex systems can be a real bear to figure out.
Take the Nefarious Bug, for instance. Since the release of OS4, we’ve seen a few Cubelets spontaneously lock up and stop functioning. It happened every once in a while in our factory, and we heard from a few customers that the same thing had happened out in the world. When we took these “bricked” Cubelets apart, we found that each one was missing a tiny little piece of memory — a random line of programming had somehow been erased. And while I can function pretty well having no idea what I ate for breakfast yesterday, the microcontrollers inside Cubelets are a little more brittle, their memories need to basically be perfect in order for them to function at all.
I’ll spare you the rundown of our debugging process. Suffice it to say that hypotheses were made, tested, and then re-made. Ideas and hopes and dreams were repeatedly generated and then dashed. It took weeks, but we finally figured it out. It was the combined behavior of a mechanical bug, an electronic bug, and a software bug, but we fixed it just with software.
The particulars of the problem are a bit obscure. Are you familiar with the Rotate Cubelet? If you’ve ever wondered how the rotating face can conduct power and data without a bunch of wires getting twisted up inside, the answer is that it uses a slip ring. Slip rings have contacts that slide around a rotating ring, using friction to make electrical contact. Sometimes this connection isn’t perfect (at least not as perfect as a soldered wire) so there tends to be some noise on the power line near Rotate Cubelets. While this shouldn’t be a problem, a big Cubelets robot has power flowing throughout all of the Cubelets and through all of the faces, and a bunch of noise on a bunch of connectors all at once ended up causing low voltage transients that wreaked a little havoc on those tiny, tiny brains.
Previously, Cubelets were riding a fine line between the voltage level at which they’d automatically shut down and the voltage level at which they could brick themselves and apparently (in less than 0.1% of Cubelets), noisy rotatey power connections could shock the Cubelet into crossing that line. Once we finally figured this out, it was pretty straightforward to repair by changing a few settings in software and testing profusely with the noisiest Rotate Cubelets we could find.
Now OS 4.3 is out in the world. I’d recommend upgrading all of your Cubelets. Its super easy to do using the iOS or Android Cubelets app.
Have you ever read Vehicles? It’s a favorite around modbot because it’s basically a set of thought experiments about how we can understand the world through simple robotic elements. As Braitenberg adds simple pieces of technology to tiny robots, the reader starts to see how lifelike complexity really can emerge from simple building blocks.
One of the little technological enhancements that results in interesting emergent behavior is stacking up simple sensors in a grid: this enables a robot to detect not only whether anything is in front of it, but to detect certain things. Apparently, we actually do a little bit of thinking with our eyes.
Take this simple Cubelets robot, for example. It’s a grid of twelve Distance sensors configured into a secret lock that can only be opened by a special key. Sure, Cubelets are robot blocks, and the resolution of the sensor grid is pretty low, but 2^12 means that there are 4096 possible combinations for a secret key. Pretty hard to hack for a toy.
Status lights are boring, though, right? Since Cubelets are modular, we’ll just snap on a few Drive blocks instead and turn the lock into a locked door. Look, candy!
I built these two robots a couple of weeks ago with a brand-new Cubelets programming system and I’ve been waiting to share them until it’s ready to launch. Today’s the day; if you’re interested, take a look at Cubelets Flash, download it, and start building some crazy custom robots.
Your Cubelets will all need to be running OS4 to connect to Cubelets Flash. Right now, if you have old Cubelets, you’ll have to use a mobile device running the Cubelets app to upgrade them first. This workflow is a little funny because we screwed up. We used to be able to program OS3 Cubelets using Cubelets Studio, and when we launched OS4 it was incompatible with Studio. It took us longer to release Flash than we thought it would, and I know that a lot of you are pretty excited to program your OS4 Cubelets. Right now it’s in beta release with only the most important functionality so that we could get it launched for you to play with as quickly as possible. Enjoy.
We just had a two-day Modular Robotics retreat in the mountains. We skied on Wednesday at Winter Park, stayed in a big house in Fraser, cooked together, and spent Thursday working on strategy and planning.
The atmosphere Thursday morning was charged with bacon grease.
This year was different from last year; we brought all of the carpet people (carpet people are all non-elves) at modbot instead of a carpet subset. It was great: every time we take a day away we seem to make amazing progress. I started off Thursday with a little story about why I Modular Robotics and what gets me up in the morning and I thought I’d share it here too:
I’ve spent some time recently with my friends’ kid who is three years old. Her incessant “why” questions can often prove thought provoking. No matter how deep she digs, you can never tell a kid that something is just because it is. Although questions of fate and trajectory are interesting for adults to discuss, telling a kid that something happened because “it was meant to be” is just a cop out.
Her lines of questioning got me thinking deeply about why Modular Robotics?
Of course, that question has many answers. Because of luck, coincidence, being in a certain place at the right time, and because of a million books read, chance encounters, and free associations.But why am I doing Modular Robotics? is easier to answer.
I started and am running Modular Robotics because I want to give people tools that will help them think better about complex systems, emergence, and the ways in which the world really works. Why? Because better thinking about complexity will help us solve the world’s big problems.
I get frustrated sometimes not just by big problems in the world, but in our reaction to them.It feels to me like most of the time, our reaction (and probably, the way that we think) is often gross oversimplification.It’s an election year, for example, and if we think hard, we know that platforms and governance comprise an extremely nuanced and complex system, with thousands of interacting parts and conflicting aims.A glance at the news, however, paints issues in terms of black and white, red and blue, praise or outrage.Things are more complicated than that, and a failure or refusal to dig a little deeper and try to understand things a little better leaves us making bad decisions.
Consider social problems, mass shootings for example.It’s universally recognized that we should all work together to reduce this sort of thing, but it’s hard to find a smart conversation about it and not a thousand shouting matches that sound like “I love guns” versus “I hate guns”.The world is not that simple, and I think we can learn to think more deeply about problems in the world and make forward progress as a species.
To really understand complex systems, patterns, and emergent behavior, we could all study complexity theory, cellular automata, and chaos, but those are abstract, rarefied fields accessible usually only to academics.I think we’ll have better results getting kids to think differently about complexity, because their minds aren’t already made up and set in their ways.
Complexity science is all about taking things apart: looking at real world systems and distilling them down into theory.But kids, and adults, often learn best by building things.When we build things, or design things, we can see many different combinations of simple pieces we understand.
People have been trying to give kids little models of complex systems for a while, but most of those have been apps (the Sims, even) or other systems that encourage you to select some pixels and watch scenarios play out on a display.I think that sometimes pixels on a screen aren’t the best models for real-world systems, but that sometimes, robot blocks might be.
I’m not saying that playing with Cubelets teaches kids complexity science.But it helps them develop intuitions about complexity, emergence, patterns, networks, computation, and lots of STEM subjects, so that when they encounter those things later, they make sense.Playing with LEGO as a kid, by way of analogy, didn’t teach me the physics of friction, balance, shape, mass, and force, but when I got to Physics in twelfth grade, the laws made sense, and the equations were just another way to describe phenomena that I was already familiar with.Some people, who hadn’t gained these intuitions through experience, were lost in a sea of Greek letters.
I think that sets of robot blocks, designed, distributed, and well supported, can help make our kids smarter about the world than we are.I want to have a really broad impact with Cubelets and change as many kids’ minds as we can.That’s what gets me up in the morning.
Modular Robotics is in full North Pole mode, building as many Cubelets as we possibly can. Demand for the new Cubelets TWELVE kit is off the chart, so we’re working extra shifts and late into the night six days a week to make as many as possible. In other words, the factory is crazy. It occurred to me that unless you’ve been by, the last photos of the factory that you may have seen were from April when we moved into our new, then empty, space. The architects who helped us with the remodel came by the other day and put up some beautiful pictures of our factory in a blog post. Take a look here!
A friend just emailed me a link to a video of a talk that I gave last year at Big Kansas City. I’m pretty happy with this one! If you want a 20 minute version of what we’re up to at Modular Robotics, this talk is way better than the TEDx one where the slides didn’t work and I ended up sweating profusely and waving my arms around.
Yesterday I tried a little experiment with my schedule: I switched all of my regular on-one-one meetings for the week to Tuesday, a single day with nine meetings in a row, no break.
The idea for this actually occurred on February 5 of this year, at our Q1 board meeting. I’m a little embarrassed that it took me this long to try. You see, somehow I found myself complaining to the board that I wasn’t able to find enough time to work on a few big projects that I knew I needed to be working on. This is not the typical stuff of board meetings. Anyway, I explained how for the last couple of years I’ve kept Wednesdays clear on my calendar, usually worked from home, and used it as design/writing/solo-thinking time because the other four days get consumed with collaboration: one-on-one and group meetings with the eight people I work most closely with at modbot. But lately, the collaboration days had gotten so busy, that Wednesdays had turned to email and administrivia catchup days and I needed more time in the week…
Brad made a suggestion: what if I were to completely flip the ratio, stack up all of my one-on-one meetings in a single weekday, and have four days to do my own work. I remember my head starting to explode a little bit and looking over at Mark and Mike who were nodding reasonably at me as if to say, “seems like a perfectly smart idea.”
While it might seem scary to stack up that many meetings in a row, I wasn’t too fazed by the idea: I like everyone on my team and the conversations are usually flowing and genuine. The part that gave me pause was wondering, all in an instant, what I might do if I had four-ish days a week to move things forward with my own projects, instead of less than one. Would I head to Japan and see what kind of cool tiny robots are happening there? Would I play around in our lab with electromagnetic bits and plastic? Check in with some of the robot labs at CU Boulder, right down the street? Finally build those little wooden robots we’ve been sketching for years? Look through a recent set of conference proceedings? Visit the Bay Area for a few days to catch up with my hardware startup friends? Read a few books about leadership, management, and inspiration and work on the parts of being a CEO that I suck at?
The idea was almost too much for me to process, but sounded tremendously tempting all the same, so I vacillated for a while before finally trying it yesterday. I’m happy to report that it was a great success! I learned some things!
Sometimes I do a little journaling in the morning. You know, Artist’s Way style or Jerry Colonna style. Previously, on meeting-heavy days, I’d think and write about the big important things that I needed to get done. Then I’d have a busy day of meetings and spontaneous business stuff, and in the evening I’d feel stressed and annoyed about not making progress on any of my big important things. Yesterday, though, I told myself in the morning that I wasn’t going to make progress on my stuff during the day, but that I was going to meet with a bunch of individuals, be present, listen, and see how I could help them. And that that might have compounding returns, and that it was valuable for modbot and an important part of my job. I think I did pretty well at that, so at the end of the day, I felt fulfilled and not exhausted. That sort of surprised me a little bit.
Another thing surprised me throughout the day. Having all of those meetings back-to-back made it easier for me to see a few trends. If the meetings had been spread throughout the week, I might not have noticed that multiple people were worried or nervous or thinking about a couple of problems that we should probably address directly and together. So we’ll try to, and that gives me a little bit of the great “we’re getting better at getting better!” feeling.
I’m not sure if today has been a great first result of having a clear meeting calendar. I went to the dentist and got a cavity filled, played with a test version of a new Cubelets operating system, and wrote this. But it’s a start. I’m definitely going to continue trying this meeting rhythm for a few more weeks.
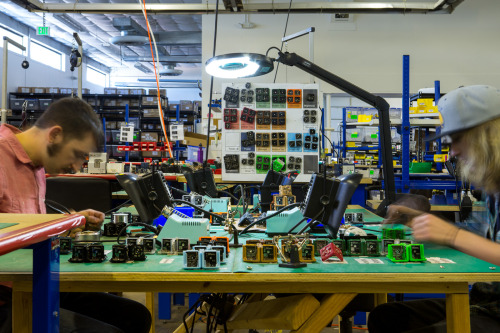
I just got home from a long week visiting suppliers in mainland China and Hong Kong; saying hello in person, touring the factories, eating big Cantonese lunches, and figuring how to optimize for Quality, Cost, and Speed, in that order. Dave, our Head of Manufacturing, was with me and is still there for a second week visiting six more suppliers. It was a pretty intense trip: we drove all around Southeast China, stayed in a different weird hotel each night, visited one or two factories each day, and sweated like crazy in 100 degree heat with oppressive, dense, saturated humidity.
I’ve written here about a couple previous trips to China: the first one in 2009 with Bunnie and crew, and the 2013 trip that resulted in our big decision to build a factory in Boulder. In between those trips, there were 5 or 6 more solo trips as I set up the supply chain for Cubelets: custom plastic injection moulds, magnets, circuit boards, stamped steel parts. These trips weren’t particularly easy or fun: long factory days, lots of driving, lots of translating, and a lot of alone time to contemplate my culture shock. By 2013 I was nursing a solid China hangover and was ready to take a break from the transpacific flight routine.
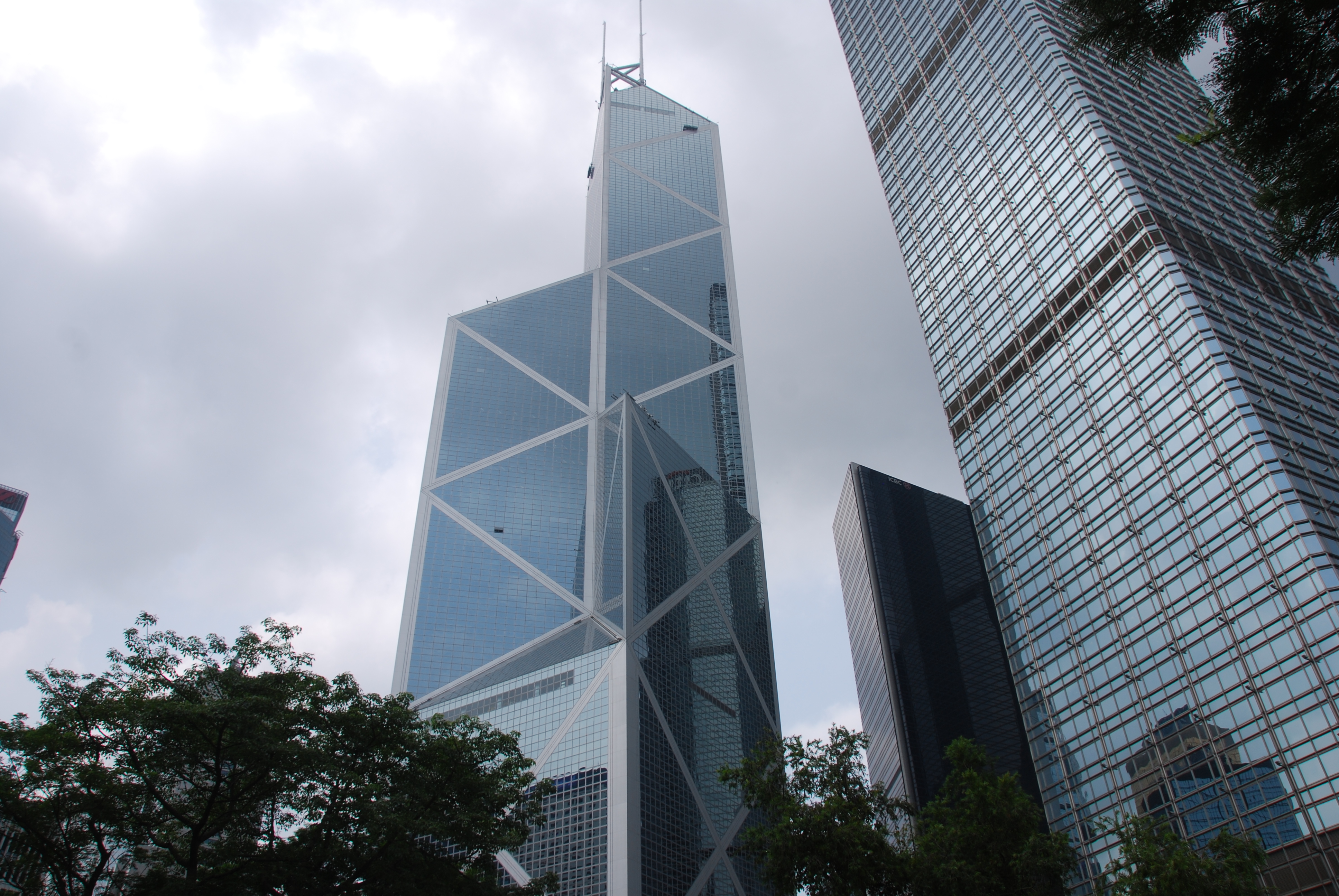
Fast forward to last Saturday. It’d been more than two years since the last trip, my China hangover had faded, and we headed out again, first to Hong Kong for a couple of days. I haven’t spent too much time in Hong Kong, usually it’s straight to the Futian border checkpoint, but we built in an extra day to acclimate and wander around. Dave and I hiked up Victoria Peak from Central (I’ve never sweated so much), took the tram down, and I got to check out the Bank of China Tower a little more closely.
I.M. Pei’s Bank of China Tower
I think it’s a beautiful building. You know, for a skyscraper. I did a little project on I.M. Pei, the architect, freshman year in architecture school (1995!), so was pleased to get up close. See those two spires on top? When the building was proposed, the drawings didn’t have them, and the local Feng Shui folks declared that the building was going to be totally bad news. Too many X’s or something. Negotiations were had, money changed hands, and the two spires were added to balance out the building and tip it back into the good fortune side of things. Anyway, I like the spires. Here’s what it looks like at night, after a few beers.
The Bank of China Tower and Central at night, from Tsim Sha Tsui
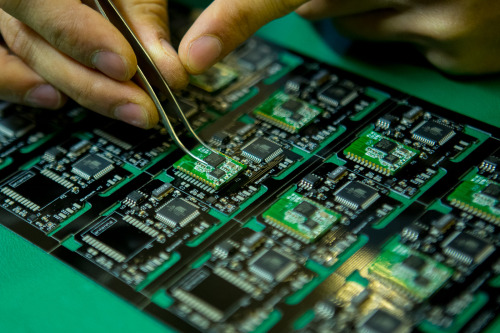
Then to the mainland, for factory visits in Shenzhen, Dongguan, Guangzhou, Conghua, and Fo Gang. We packed it in, had a lot of great discussions with manufacturers, and saw a ton of production lines. I’m mostly concerned about auditing the factories for environmental and human rights metrics, and was impressed.
I’ll freely admit that this trip wasn’t the easiest thing in the world for me: it was exhausting, I missed home, modbot, exercise, and fresh air. But it was productive for Modular Robotics, and we made some decisions on the ground that will strongly influence our next few years. I’m glad I sucked it up and went myself: Modular Robotics is having a greater and greater impact in the world, and I feel like I need to understand that firsthand. But it’s really good to be home.
Connie, KL, Mickey, Dave, me, and Patrick at JettaDan, me, Dave, Sharen, and Carrie at Kin Yat.
Want to hear something amusing? I flew thousands of miles around the world on a tightly planned and critical business trip, and I spaced and left my laptop at home. Like a moron. Early the morning that I left, I was all packed and ready, and I pulled out my MacBook to send a couple of emails. I was hoping for a quick response on one of them, so I left the machine open on the dining table, took a shower, and then grabbed my bag and left for the airport. I realized my mistake while I was standing in the security line at DIA. There wasn’t anything I could do about it, so luckily my brain mostly skipped panic and went straight to resignation: “maybe it’ll do me good to get out from behind that thing for a week.” Maybe it did.
What’s that, you say? The Elves in production are planning a coup? No, right now the elves appear to be happily building robots, listening to the Allman Brothers, and drinking coffee out of the new sippy cups we got in an attempt to reduce spills on the assembly line.
No, by COO, I mean Chief Operations Officer. We’re looking to hire the absolute best most amazing Chief Operations Officer alive. A what? A COO. Someone to run day-to-day operations at Modular Robotics. A description of the role from our little Roles and Responsibilities document:
The COO is responsible for managing day-to-day operations according to annual and quarterly projections. While the CEO sets the overall strategy, the COO carries it out and leads the directors of the Sales, Production, IT, Facilities, and Shipping teams to formulate their plans and execute on them. The COO is responsible for many metrics including margin, efficiency, production volume, and sales results across direct, reseller, and education channels.
This is a completely new position – we’re not replacing anyone, we’re creating the position from scratch. I’d like to tell you why.
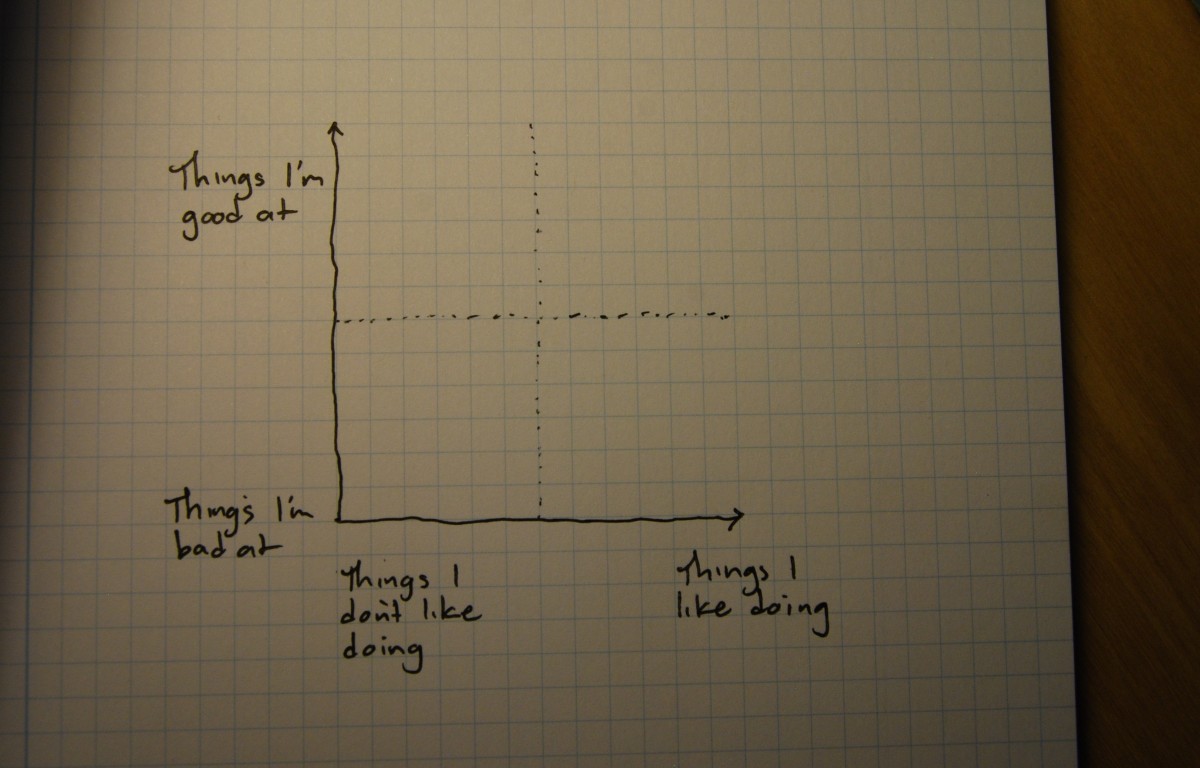
Almost every week for the last six or eight years, I’ve been drawing this little chart in my notebook.
It’s a quadrant chart. I draw it and then work through what I did in the prior week putting little labeled dots into the quadrants. There, I spilled the beans. That little quadrant chart is my secret to productivity and happiness. No, really! As modbot has grown from 2 to 100 people, my job has changed a lot. When we were first getting started, I noticed I kept putting Accounting and Supply Chain tasks into the lower-left quadrant, so those positions were our first two hires and my chart changed dramatically the next week.
These days, the things that fall into my lower left quadrant all have to do with day-to-day management. I’m not very good at it, apparently (we still can’t make nearly enough tiny robots to satisfy demand) and I don’t particularly enjoy it. The worst part is that lately, I’ve spent all of my time working on operational matters because I suck at it and we’re not meeting our day-to-day, month-to-month production volume goals. Since I’ve been spending so much time working on the machine that is modbot, I haven’t focused much on where the machine is going: strategy, communication, financing, R&D, our tiny robot roadmap, and all of the other things that inhabit my upper-right quadrant. So: compounding negative returns = time for a change.
The notion that maybe I should find someone else to be modbot’s CEO has occurred to me. Maybe I was OK at the job for the first few years but modbot needs somebody different for the next few? My friend Nathan is doing this right now, and seeing him so excited to return to designing stuff, instead of managing stuff, induces a twinge of envy. I even brought it up with our Board of Directors, who counseled that I was probably the best person to lead the company, but that I might consider a strategic hire to take on some serious responsibility so that I can spend some more time in my upper right quadrant.
Many companies don’t have COOs. But Modular Robotics is an operationally intensive business. The processes and systems involved in making thousands and thousands of tiny robots are complex, serious, and demand focus and experience. So we’re looking for someone amazing. Somebody who has led a hardware company from millions per year to tens of millions. Somebody who I can completely trust to manage toward metrics and grow our operations while I focus on the other half. Wait, which other half?
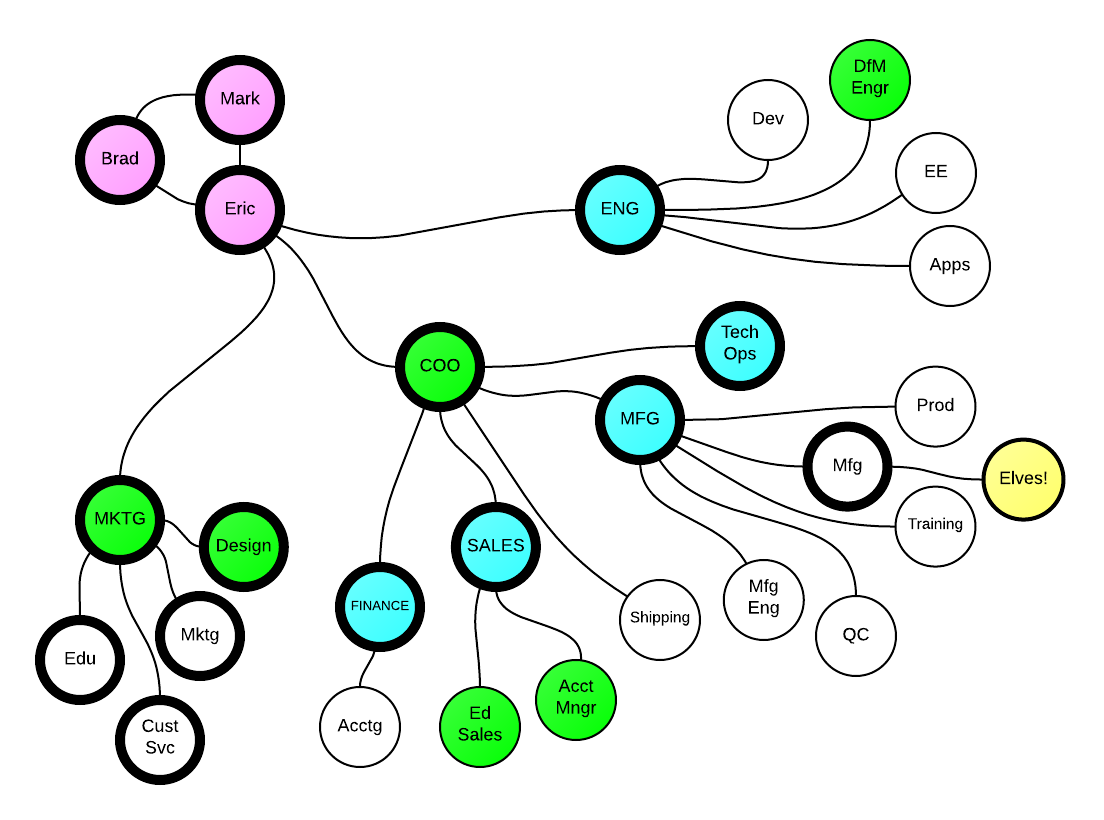
Can we look at charts for a minute? Thanks. I really love charts. Here’s the first version of our org chart that I made with a COO added into the mix.
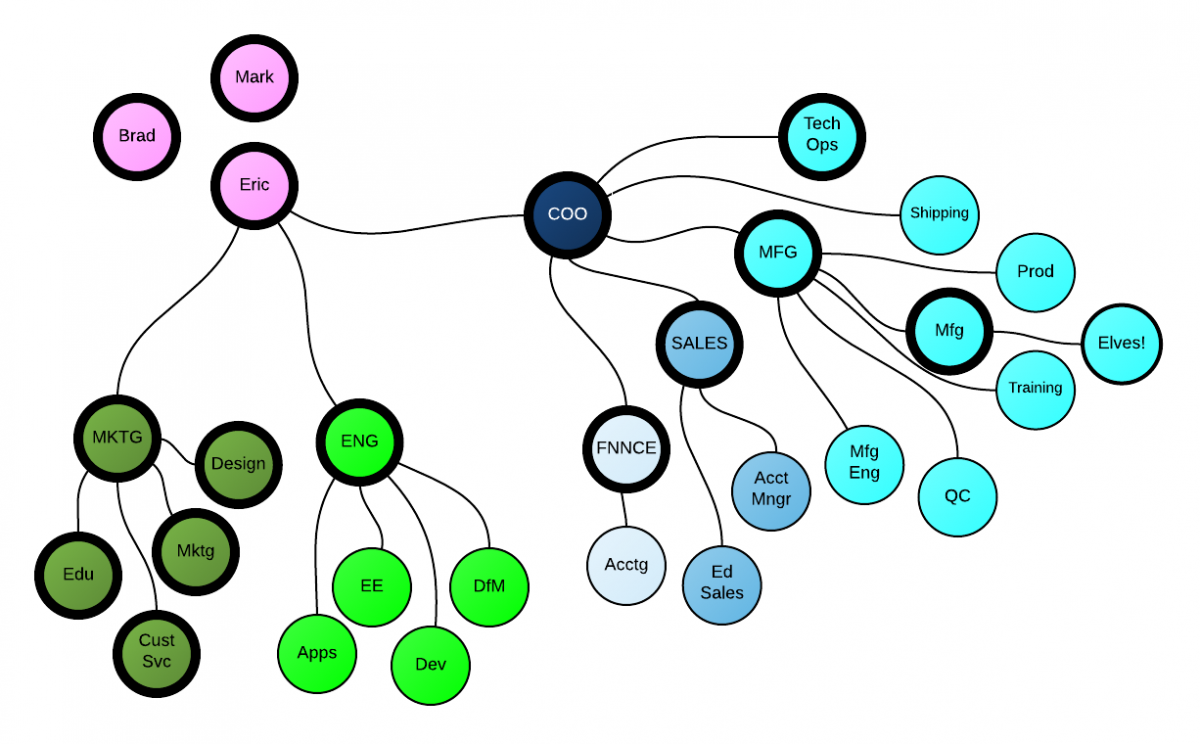
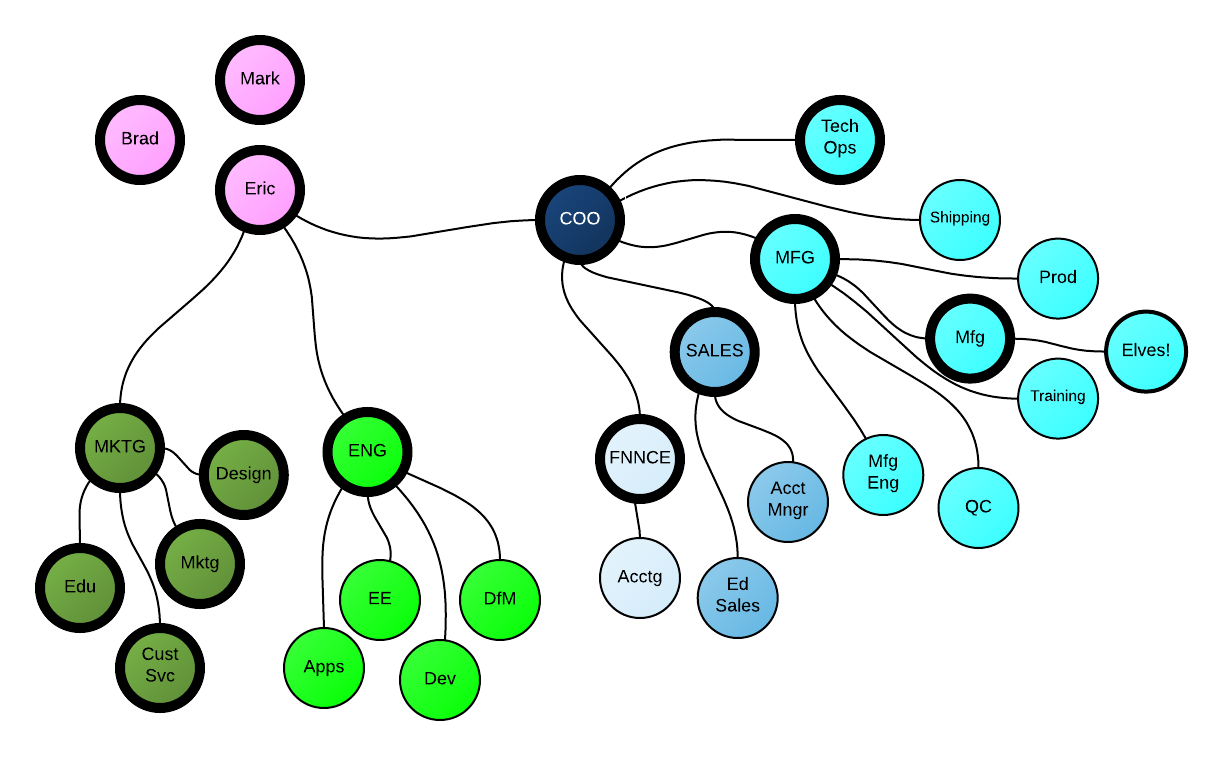
That org chart isn’t totally satisfying. It puts a COO in charge of Manufacturing, Sales, Finance, and Tech Ops, and puts me in charge of the rest: Engineering and Marketing. But it strikes me that the distinction between the two halves is not arbitrary, that it’s meaningful. The Operations half is running the machine, the other half, which figures out where the machine is going, is the Design half. Engineering designs products, Marketing designs media and materials, and our Product teams design experiences and educational activities. I like to consider these as tags, not as categories, because complex systems like Modular Robotics don’t map very well to getting put in little boxes, but here’s a second stab at our org chart where Design is green and Ops is blue.
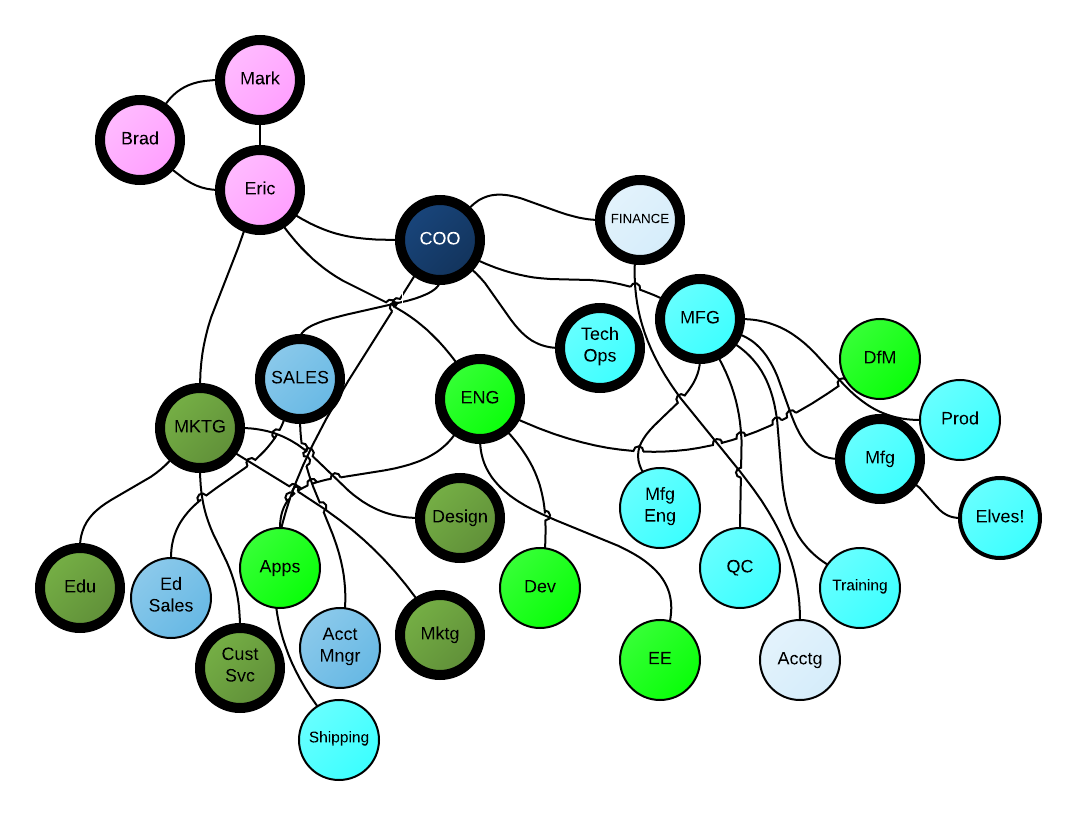
I like this view. It’s a more helpful framework for me to think about the complex system that is modbot than a traditional business hierarchy (probably because I’m a designer, not a MBA). But it implies something inaccurate, which is that the heirarchy effectively isolates different tree branches. Sales goes up through COO but Marketing goes up through CEO. Sales and Marketing, in reality, work extremely closely together, but the chart makes it look otherwise. So I made one more attempt.
Perfect, right? OK, maybe the previous one is easier to understand. Where were we? Right, the COO position. It’s taken me a while to figure this out. I’ve read, I’ve journaled, and I’ve talked with a bunch of other CEOs, our investors, and my mentors. I particularly liked this article that identified four major failure patterns in the COO role. We’ve got the right reason, the right time, now we need to find the right person and make sure we have the right support structures in place. This isn’t a role that we’ll post an ad on craigslist for, in fact, I’m not even going to put up a normal job posting for it. Are you the right person? Do you know the right person? Drop me a note!

 Modular Robotics is in full North Pole mode, building as many Cubelets as we possibly can. Demand for the new Cubelets TWELVE kit is off the chart, so we’re working extra shifts and late into the night six days a week to make as many as possible. In other words, the factory is crazy. It occurred to me that unless you’ve been by, the last photos of the factory that you may have seen were from April when we moved into our new, then empty, space. The architects who helped us with the remodel came by the other day and put up some beautiful pictures of our factory in a blog post. Take a look here!
Modular Robotics is in full North Pole mode, building as many Cubelets as we possibly can. Demand for the new Cubelets TWELVE kit is off the chart, so we’re working extra shifts and late into the night six days a week to make as many as possible. In other words, the factory is crazy. It occurred to me that unless you’ve been by, the last photos of the factory that you may have seen were from April when we moved into our new, then empty, space. The architects who helped us with the remodel came by the other day and put up some beautiful pictures of our factory in a blog post. Take a look here!
 “Leading indicators jump past expectations in June”, CNBC, Thursday, 23 Jul 2015
“Leading indicators jump past expectations in June”, CNBC, Thursday, 23 Jul 2015 


 It’s a quadrant chart. I draw it and then work through what I did in the prior week putting little labeled dots into the quadrants. There, I spilled the beans. That little quadrant chart is my secret to productivity and happiness. No, really! As modbot has grown from 2 to 100 people, my job has changed a lot. When we were first getting started, I noticed I kept putting Accounting and Supply Chain tasks into the lower-left quadrant, so those positions were our first two hires and my chart changed dramatically the next week.
These days, the things that fall into my lower left quadrant all have to do with day-to-day management. I’m not very good at it, apparently (we still can’t make nearly enough tiny robots to satisfy demand) and I don’t particularly enjoy it. The worst part is that lately, I’ve spent all of my time working on operational matters because I suck at it and we’re not meeting our day-to-day, month-to-month production volume goals. Since I’ve been spending so much time working on the machine that is modbot, I haven’t focused much on where the machine is going: strategy, communication, financing, R&D, our tiny robot roadmap, and all of the other things that inhabit my upper-right quadrant. So: compounding negative returns = time for a change.
The notion that maybe I should find someone else to be modbot’s CEO has occurred to me. Maybe I was OK at the job for the first few years but modbot needs somebody different for the next few? My friend Nathan is doing this right now, and seeing him so excited to return to designing stuff, instead of managing stuff, induces a twinge of envy. I even brought it up with our Board of Directors, who counseled that I was probably the best person to lead the company, but that I might consider a strategic hire to take on some serious responsibility so that I can spend some more time in my upper right quadrant.
Many companies don’t have COOs. But Modular Robotics is an operationally intensive business. The processes and systems involved in making thousands and thousands of tiny robots are complex, serious, and demand focus and experience. So we’re looking for someone amazing. Somebody who has led a hardware company from millions per year to tens of millions. Somebody who I can completely trust to manage toward metrics and grow our operations while I focus on the other half. Wait, which other half?
Can we look at charts for a minute? Thanks. I really love charts. Here’s the first version of our org chart that I made with a COO added into the mix.
It’s a quadrant chart. I draw it and then work through what I did in the prior week putting little labeled dots into the quadrants. There, I spilled the beans. That little quadrant chart is my secret to productivity and happiness. No, really! As modbot has grown from 2 to 100 people, my job has changed a lot. When we were first getting started, I noticed I kept putting Accounting and Supply Chain tasks into the lower-left quadrant, so those positions were our first two hires and my chart changed dramatically the next week.
These days, the things that fall into my lower left quadrant all have to do with day-to-day management. I’m not very good at it, apparently (we still can’t make nearly enough tiny robots to satisfy demand) and I don’t particularly enjoy it. The worst part is that lately, I’ve spent all of my time working on operational matters because I suck at it and we’re not meeting our day-to-day, month-to-month production volume goals. Since I’ve been spending so much time working on the machine that is modbot, I haven’t focused much on where the machine is going: strategy, communication, financing, R&D, our tiny robot roadmap, and all of the other things that inhabit my upper-right quadrant. So: compounding negative returns = time for a change.
The notion that maybe I should find someone else to be modbot’s CEO has occurred to me. Maybe I was OK at the job for the first few years but modbot needs somebody different for the next few? My friend Nathan is doing this right now, and seeing him so excited to return to designing stuff, instead of managing stuff, induces a twinge of envy. I even brought it up with our Board of Directors, who counseled that I was probably the best person to lead the company, but that I might consider a strategic hire to take on some serious responsibility so that I can spend some more time in my upper right quadrant.
Many companies don’t have COOs. But Modular Robotics is an operationally intensive business. The processes and systems involved in making thousands and thousands of tiny robots are complex, serious, and demand focus and experience. So we’re looking for someone amazing. Somebody who has led a hardware company from millions per year to tens of millions. Somebody who I can completely trust to manage toward metrics and grow our operations while I focus on the other half. Wait, which other half?
Can we look at charts for a minute? Thanks. I really love charts. Here’s the first version of our org chart that I made with a COO added into the mix.
 That org chart isn’t totally satisfying. It puts a COO in charge of Manufacturing, Sales, Finance, and Tech Ops, and puts me in charge of the rest: Engineering and Marketing. But it strikes me that the distinction between the two halves is not arbitrary, that it’s meaningful. The Operations half is running the machine, the other half, which figures out where the machine is going, is the Design half. Engineering designs products, Marketing designs media and materials, and our Product teams design experiences and educational activities. I like to consider these as tags, not as categories, because complex systems like Modular Robotics don’t map very well to getting put in little boxes, but here’s a second stab at our org chart where Design is green and Ops is blue.
That org chart isn’t totally satisfying. It puts a COO in charge of Manufacturing, Sales, Finance, and Tech Ops, and puts me in charge of the rest: Engineering and Marketing. But it strikes me that the distinction between the two halves is not arbitrary, that it’s meaningful. The Operations half is running the machine, the other half, which figures out where the machine is going, is the Design half. Engineering designs products, Marketing designs media and materials, and our Product teams design experiences and educational activities. I like to consider these as tags, not as categories, because complex systems like Modular Robotics don’t map very well to getting put in little boxes, but here’s a second stab at our org chart where Design is green and Ops is blue.
 I like this view. It’s a more helpful framework for me to think about the complex system that is modbot than a traditional business hierarchy (probably because I’m a designer, not a MBA). But it implies something inaccurate, which is that the heirarchy effectively isolates different tree branches. Sales goes up through COO but Marketing goes up through CEO. Sales and Marketing, in reality, work extremely closely together, but the chart makes it look otherwise. So I made one more attempt.
I like this view. It’s a more helpful framework for me to think about the complex system that is modbot than a traditional business hierarchy (probably because I’m a designer, not a MBA). But it implies something inaccurate, which is that the heirarchy effectively isolates different tree branches. Sales goes up through COO but Marketing goes up through CEO. Sales and Marketing, in reality, work extremely closely together, but the chart makes it look otherwise. So I made one more attempt.
 Perfect, right? OK, maybe the previous one is easier to understand. Where were we? Right, the COO position. It’s taken me a while to figure this out. I’ve read, I’ve journaled, and I’ve talked with a bunch of other CEOs, our investors, and my mentors. I particularly liked this article that identified four major failure patterns in the COO role. We’ve got the right reason, the right time, now we need to find the right person and make sure we have the right support structures in place. This isn’t a role that we’ll post an ad on craigslist for, in fact, I’m not even going to put up a normal job posting for it. Are you the right person? Do you know the right person? Drop me a note!
Perfect, right? OK, maybe the previous one is easier to understand. Where were we? Right, the COO position. It’s taken me a while to figure this out. I’ve read, I’ve journaled, and I’ve talked with a bunch of other CEOs, our investors, and my mentors. I particularly liked this article that identified four major failure patterns in the COO role. We’ve got the right reason, the right time, now we need to find the right person and make sure we have the right support structures in place. This isn’t a role that we’ll post an ad on craigslist for, in fact, I’m not even going to put up a normal job posting for it. Are you the right person? Do you know the right person? Drop me a note! 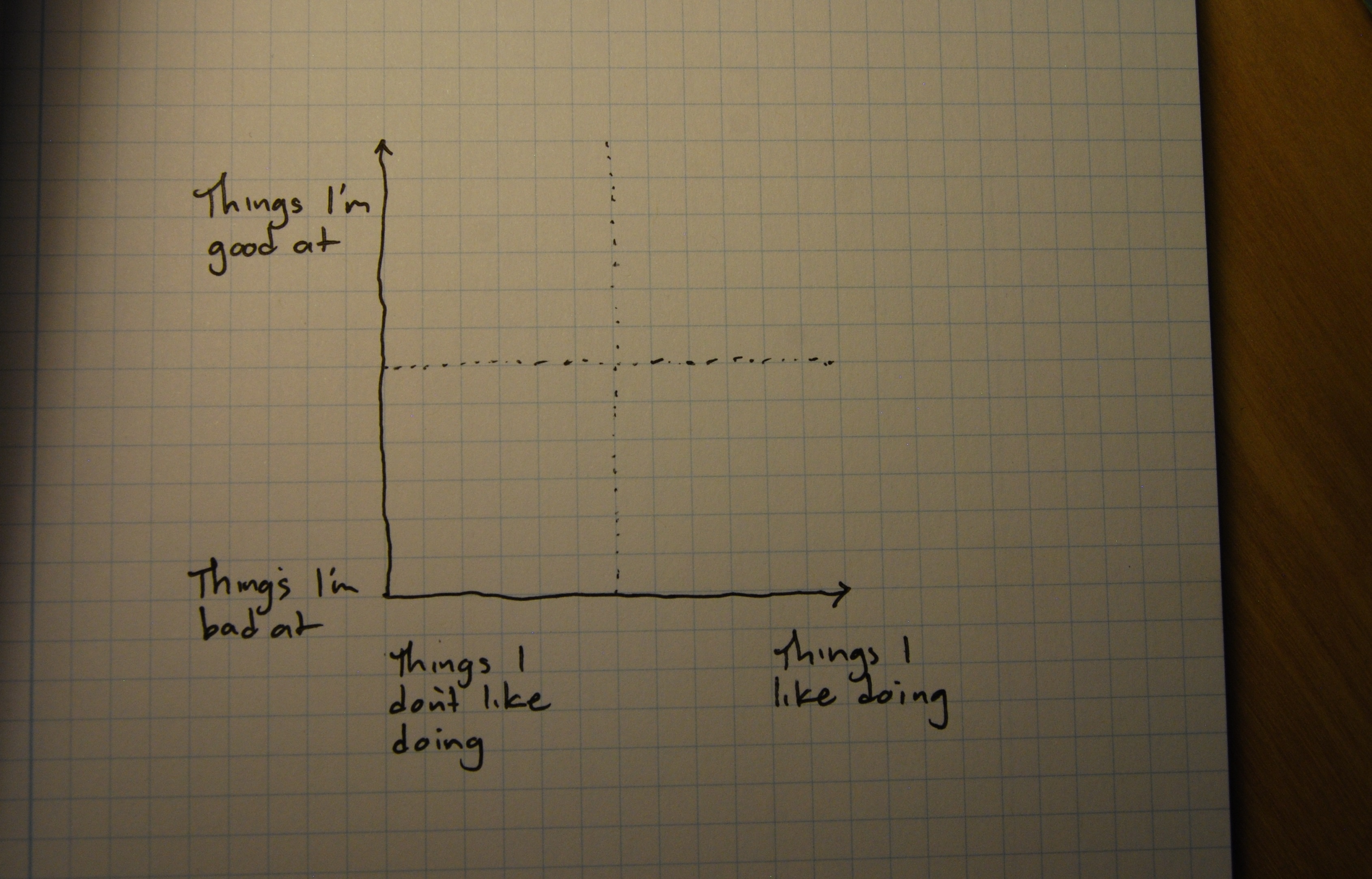 It’s a quadrant chart. I draw it and then work through what I did in the prior week putting little labeled dots into the quadrants. There, I spilled the beans. That little quadrant chart is my secret to productivity and happiness. No, really! As modbot has grown from 2 to 100 people, my job has changed a lot. When we were first getting started, I noticed I kept putting Accounting and Supply Chain tasks into the lower-left quadrant, so those positions were our first two hires and my chart changed dramatically the next week.
These days, the things that fall into my lower left quadrant all have to do with day-to-day management. I’m not very good at it, apparently (we still can’t make nearly enough tiny robots to satisfy demand) and I don’t particularly enjoy it. The worst part is that lately, I’ve spent all of my time working on operational matters because I suck at it and we’re not meeting our day-to-day, month-to-month production volume goals. Since I’ve been spending so much time working on the machine that is modbot, I haven’t focused much on where the machine is going: strategy, communication, financing, R&D, our tiny robot roadmap, and all of the other things that inhabit my upper-right quadrant. So: compounding negative returns = time for a change.
The notion that maybe I should find someone else to be modbot’s CEO has occurred to me. Maybe I was OK at the job for the first few years but modbot needs somebody different for the next few? My friend Nathan is doing this right now, and seeing him so excited to return to designing stuff, instead of managing stuff, induces a twinge of envy. I even brought it up with our Board of Directors, who counseled that I was probably the best person to lead the company, but that I might consider a strategic hire to take on some serious responsibility so that I can spend some more time in my upper right quadrant.
Many companies don’t have COOs. But Modular Robotics is an operationally intensive business. The processes and systems involved in making thousands and thousands of tiny robots are complex, serious, and demand focus and experience. So we’re looking for someone amazing. Somebody who has led a hardware company from millions per year to tens of millions. Somebody who I can completely trust to manage toward metrics and grow our operations while I focus on the other half. Wait, which other half?
Can we look at charts for a minute? Thanks. I really love charts. Here’s the first version of our org chart that I made with a COO added into the mix.
It’s a quadrant chart. I draw it and then work through what I did in the prior week putting little labeled dots into the quadrants. There, I spilled the beans. That little quadrant chart is my secret to productivity and happiness. No, really! As modbot has grown from 2 to 100 people, my job has changed a lot. When we were first getting started, I noticed I kept putting Accounting and Supply Chain tasks into the lower-left quadrant, so those positions were our first two hires and my chart changed dramatically the next week.
These days, the things that fall into my lower left quadrant all have to do with day-to-day management. I’m not very good at it, apparently (we still can’t make nearly enough tiny robots to satisfy demand) and I don’t particularly enjoy it. The worst part is that lately, I’ve spent all of my time working on operational matters because I suck at it and we’re not meeting our day-to-day, month-to-month production volume goals. Since I’ve been spending so much time working on the machine that is modbot, I haven’t focused much on where the machine is going: strategy, communication, financing, R&D, our tiny robot roadmap, and all of the other things that inhabit my upper-right quadrant. So: compounding negative returns = time for a change.
The notion that maybe I should find someone else to be modbot’s CEO has occurred to me. Maybe I was OK at the job for the first few years but modbot needs somebody different for the next few? My friend Nathan is doing this right now, and seeing him so excited to return to designing stuff, instead of managing stuff, induces a twinge of envy. I even brought it up with our Board of Directors, who counseled that I was probably the best person to lead the company, but that I might consider a strategic hire to take on some serious responsibility so that I can spend some more time in my upper right quadrant.
Many companies don’t have COOs. But Modular Robotics is an operationally intensive business. The processes and systems involved in making thousands and thousands of tiny robots are complex, serious, and demand focus and experience. So we’re looking for someone amazing. Somebody who has led a hardware company from millions per year to tens of millions. Somebody who I can completely trust to manage toward metrics and grow our operations while I focus on the other half. Wait, which other half?
Can we look at charts for a minute? Thanks. I really love charts. Here’s the first version of our org chart that I made with a COO added into the mix.
 I like this view. It’s a more helpful framework for me to think about the complex system that is modbot than a traditional business hierarchy (probably because I’m a designer, not a MBA). But it implies something inaccurate, which is that the heirarchy effectively isolates different tree branches. Sales goes up through COO but Marketing goes up through CEO. Sales and Marketing, in reality, work extremely closely together, but the chart makes it look otherwise. So I made one more attempt.
I like this view. It’s a more helpful framework for me to think about the complex system that is modbot than a traditional business hierarchy (probably because I’m a designer, not a MBA). But it implies something inaccurate, which is that the heirarchy effectively isolates different tree branches. Sales goes up through COO but Marketing goes up through CEO. Sales and Marketing, in reality, work extremely closely together, but the chart makes it look otherwise. So I made one more attempt.
