I’ve been having a lot of fun at Modular Robotics lately. It’s been a bit of a whirlwind with a lot of changes, a lot of new collaborators, a lot of new ideas, and a lot of creative problem solving. It never occurred to me that we’d grow by acquiring other companies, but here we are: just a few weeks ago, we completed the transaction to merge with
Dexter Industries and we’ve been busy integrating our new team members and making plans for the future.
Dexter has been on my radar since about 2013. Back then, they were making a bunch of interesting high-end sensors and extensions for LEGO Mindstorms, and I thought the idea was compelling: build on a commercially successful construction kit to enable kids (and
AFOL) to explore further than the stock pieces and configuration allowed. Dexter has grown and changed quite a bit since then, focusing over the last few years on mobile robots for education. They’re still building off of the work of other successful projects; the
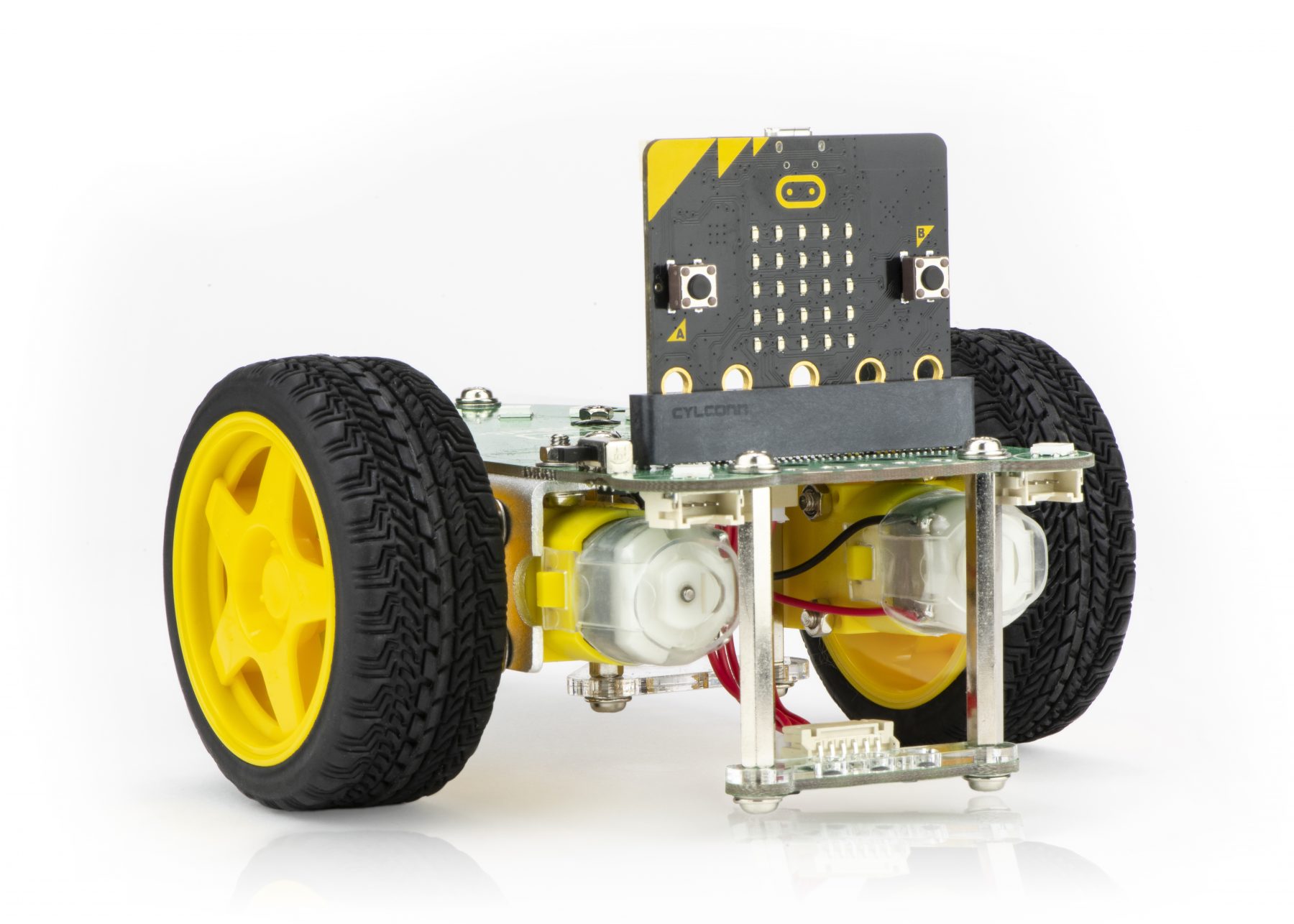
Gigglebot, below, is built around a
micro:bit and the
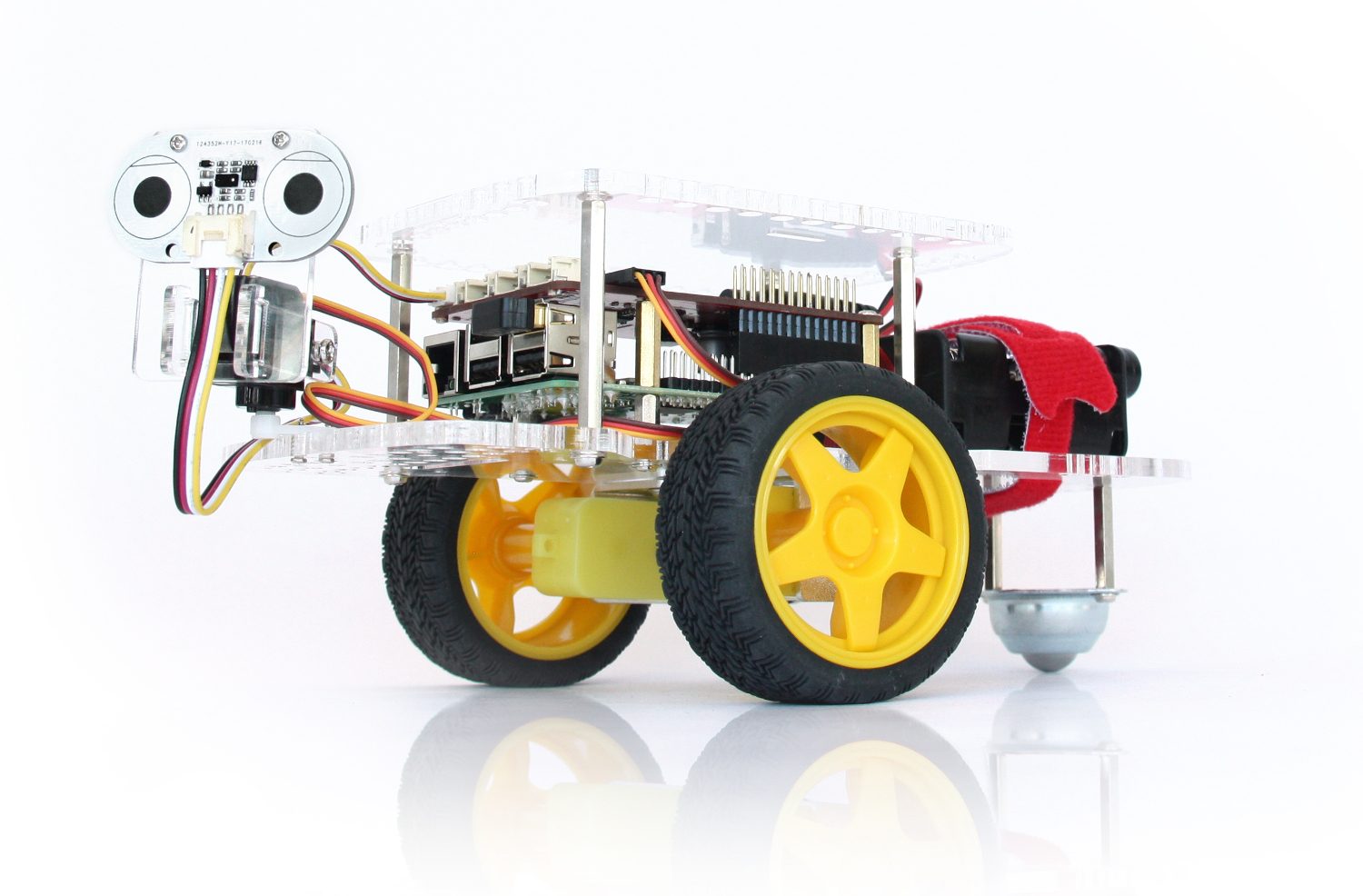
GoPiGo, further down, is built around a
Raspberry Pi.
Up until a couple of years ago, we didn’t think much about teaching kids to code. I feel strongly that the push to teach coding in elementary schools is misguided: that we should start with teaching computational thinking, away from a computer screen, and only get kids started coding when it starts to become something that they want or need to do in order to solve a problem or make something. We hear all the time about how it’s important to teach little kids to code, but most of the time I think we’re hearing it from people who don’t really code themselves and see it naively as a step on the path to a good twenty-first century job. Those of us who write code every day know that it’s just one of many tools needed to design something. It’s important to start from the beginning, with logic, computational thinking, and creativity, before moving to programming.
I’m proud that Cubelets have been a big success at helping kids learn to think. With Cubelets, kids as young as four are learning about things like feedback, control, loops, recursion, inputs/outputs, sensors, and networking all before they start programming. Later, after kids learn the basics of programming, Cubelets are again a powerful tool: kids can code them to make complex distributed systems: concurrent models of cities, animals, and ecosystems. But the complexity of Cubelets makes them not the best tool for the step in the middle: learning and practicing the basics of programming. Since Cubelets are a parallel system, they can quickly get complicated for learning to code. It’s much easier to start small and code a simple robot than it is to code an interconnected mass of twenty!
I first learned some programming in
Logo. My dad tells the story of coming to first grade parents’ night at Coleytown Elementary School in 1983 or so and seeing me demonstrate directing my little green turtle icon around on an Apple II screen with lines of code. My dad likes to say that he saw the future that night. He went home and bought a Commodore 64, learned how to use it, and later, as a professional photographer, became an early adopter of digital imaging, Photoshop and image databases. Anyway. Something about using code to create geometric patterns and illustrations was the bait that drew me in.
A lot of people don’t know that
the first Logo turtles were physical robots, not the familiar on-screen triangles. Back in 1960 it wasn’t practical to have a physical robot for every kid, so we made do with on-screen simulations. In 2019, it’s eminently practical, and the real-world behavior, tangibility, physicality, and connection to natural systems make robots an excellent tool for teaching kids to code.
At first, we thought we’d design a coding robot from scratch. Modular Robotics is a spinoff from an academic research lab at Carnegie Mellon University, and the desire to invent new things is part of our culture. But after a few discussions with John Cole, Dexter’s founder and CEO, it was apparent that there was a better path right in front of us. On July 1, 2019, Modular Robotics bought Dexter Industries, and not only have we expanded the set of learn-to-code tools in our product line, we’ve got a great new team of experts to work with moving forward.
John is a pretty amazing human being. He started Dexter Industries in his kitchen, after working in alternative energy and a variety of other fields too. He has an insatiable curiosity, combined with the capability to realize his crazy ideas, and that draws everyone toward wanting to work with him. Over the last ten years he’s spent time in Afghanistan, India, Iraq, and many other places, and has some unique stories to tell. I’m honored and thrilled to have him on the Modular Robotics team as a close collaborator, along with the impressive collection of characters who make up the rest of the Dexter team.
People seem to recoil a bit at the word “synergy”. I think it gets thrown around too much in the business community and has lost some of its meaning. But in the context of mergers and acquisitions, it has a very specific meaning. Putting our two companies together results in a lot of synergies; areas in which the best of one company can combine with the best of the other, creating a whole that’s more than the sum of its parts: a whole that’s more like the product of its parts. By multiplying Modular Robotics’ operations, reach, design, education experience, and network with Dexter’s innovation, engineering, university programs, and coding robots, we’re way more effective than when both of us were out there trying to do everything on our own. If you still hate the word “synergy,” maybe try
syzygy. It’s a much cooler word. Or
zymurgy, which I fondly recall from being a little kid who read the dictionary, often backward. Ok, sorry, I’m getting distracted.
We’re making one awesome change immediately. Starting today, all of the Dexter curricula, lesson plans, and activities will be available free of charge, under a Creative Commons license, for educators to download, remix, and re-use, however they desire. It’s a treasure trove of awesome content and I’m psyched to get it into more teachers’ hands. The materials that the Dexter team have designed and built over the years are a direct fit with our mission, and making them available at no charge feels like a great way to quickly scale up and help many more kids become better thinkers.
Other changes will be slower. We’ve already got our design, education, and engineering teams collaborating on a couple of new Cubelets and some educational material to be launched early next year. We’re starting in on a couple of top secret projects as well. For now, the Gigglebot, GoPiGo, BrickPi, GrovePi, and the rest of the new products will stay branded as Dexter Industries products. When you place an order, it’ll ship from Modular Robotics in Boulder, Colorado, and when you email customer support, you’ll be reaching our new, combined team. I’m excited to share some fun new things in the coming months, but for now, we’re charging ahead and trying to break as few things as we can in the meantime.
Zooming back out for a minute, I’m tremendously proud that our team was able to put this merger together, especially within the current context of quite a few IoT and consumer robotics companies (
Anki,
Jibo,
Reach…) shutting down. Casual observers might make an assumption that the consumer robotics market isn’t as promising as previously thought, but I’m certain that’s incorrect and that all of those companies were simply spending way more money than they were making.
Hardware is hard, no doubt, but as we get closer to shipping the millionth Cubelet, it feels like we’ve built a strong foundation helping kids become better thinkers. This acquisition allows us to immediately scale up and impact a greater number of kids and a more diverse set of learners. I’m incredibly excited for what’s next.
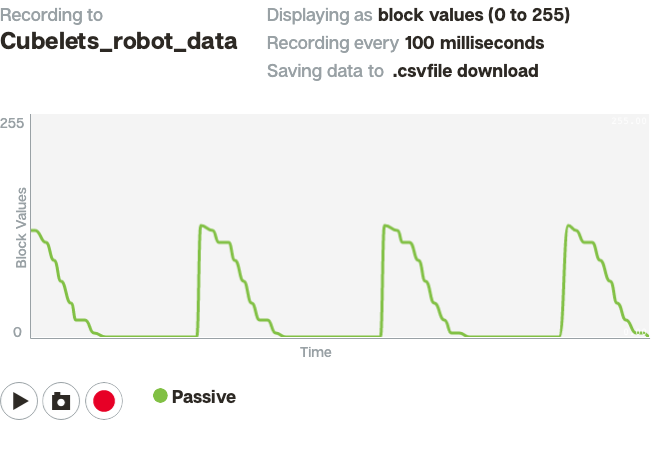
 Console replaces the Blockly and C programming apps and lets you do both at the same time. It also lets you Personality Swap your Cubelets to change their behavior with pre-written programs. Most exciting for me, though, is the new Data Logger interface. Connect a Sense Cubelet or three and watch their block values change over time. Add an Inverse and watch the complementary graphs. See if your kid can make a sawtooth waveform with a distance sensor. Track temperature or light data and export it to a CSV or a Google Sheet. Experiment!
I’m at home this afternoon and I noticed that although the sun is streaming in a couple of south-facing windows, our little cactus was in the shade between the windows, a temporary dark spot as the sun tracks across the sky. I thought maybe I’d build a little self-driving car for the cactus. You know, like Uber for plants!
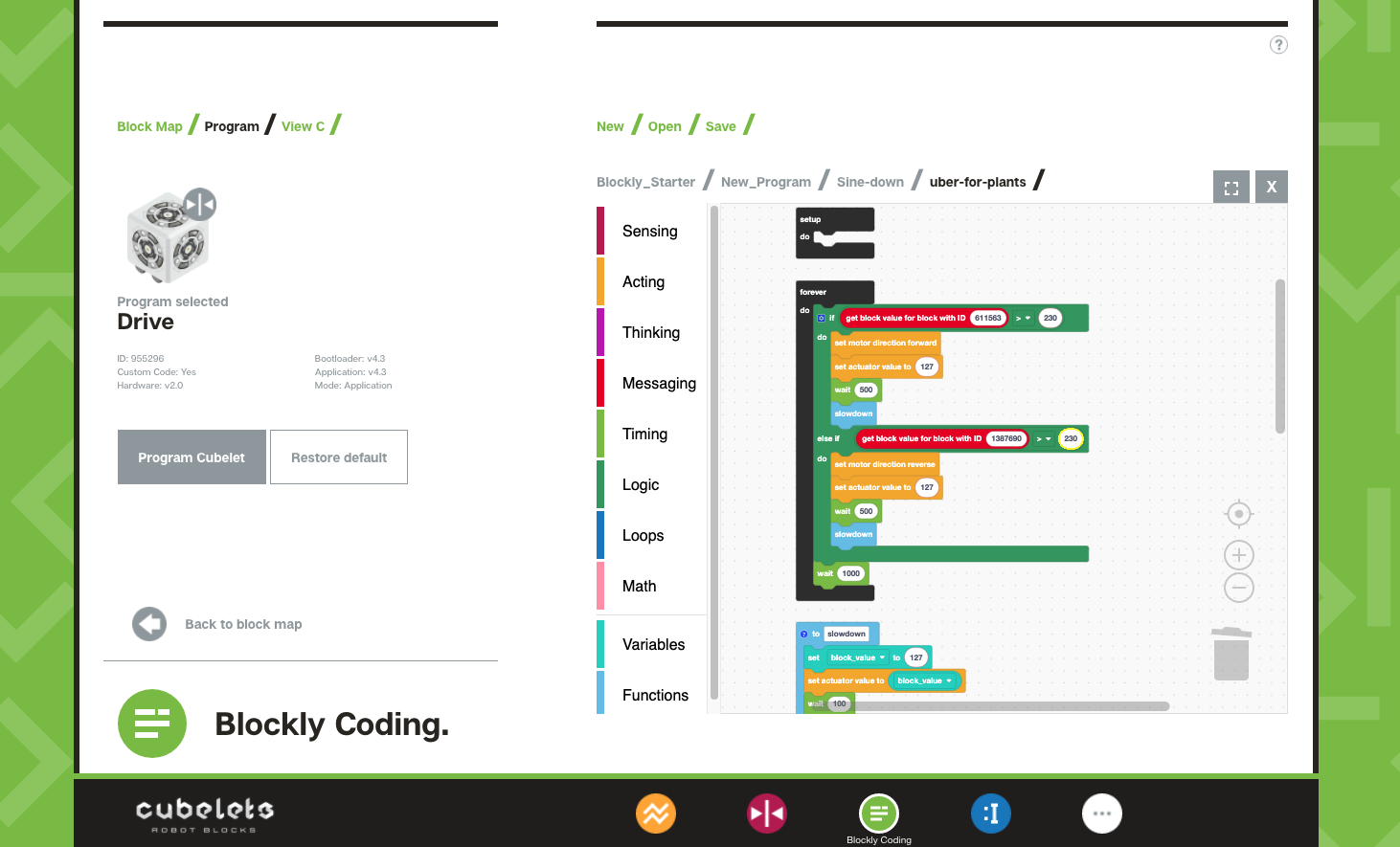
Cacti like to be in the sun, so I figured I’d start with a Drive Cubelet as the base and a couple of light sensors so that the robot knows where to go. But before I put a plant on top of anything, I knew I’d want to ease the back-and-forth motion of the robot so that it didn’t come to a jarring stop when it found light and bounce the plant right off. I thought it’d be elegant for the robot to slow its velocity along something like a sine wave. Sin() is a bit heavy for a microcontroller, so I found a web site that generated lookup values for a sine wave and tried pasting a few of those data values into a Blockly program (sine-down.cubelet) that sine-waves down from 127 (half speed) every few seconds. Then I found the magic of Console. I switched quickly back over to Data Logger to verify that my code was working and saw these little approximated sine waves.
Console replaces the Blockly and C programming apps and lets you do both at the same time. It also lets you Personality Swap your Cubelets to change their behavior with pre-written programs. Most exciting for me, though, is the new Data Logger interface. Connect a Sense Cubelet or three and watch their block values change over time. Add an Inverse and watch the complementary graphs. See if your kid can make a sawtooth waveform with a distance sensor. Track temperature or light data and export it to a CSV or a Google Sheet. Experiment!
I’m at home this afternoon and I noticed that although the sun is streaming in a couple of south-facing windows, our little cactus was in the shade between the windows, a temporary dark spot as the sun tracks across the sky. I thought maybe I’d build a little self-driving car for the cactus. You know, like Uber for plants!
Cacti like to be in the sun, so I figured I’d start with a Drive Cubelet as the base and a couple of light sensors so that the robot knows where to go. But before I put a plant on top of anything, I knew I’d want to ease the back-and-forth motion of the robot so that it didn’t come to a jarring stop when it found light and bounce the plant right off. I thought it’d be elegant for the robot to slow its velocity along something like a sine wave. Sin() is a bit heavy for a microcontroller, so I found a web site that generated lookup values for a sine wave and tried pasting a few of those data values into a Blockly program (sine-down.cubelet) that sine-waves down from 127 (half speed) every few seconds. Then I found the magic of Console. I switched quickly back over to Data Logger to verify that my code was working and saw these little approximated sine waves.
 Then I flashed the code into a Drive Cubelet and saw this:
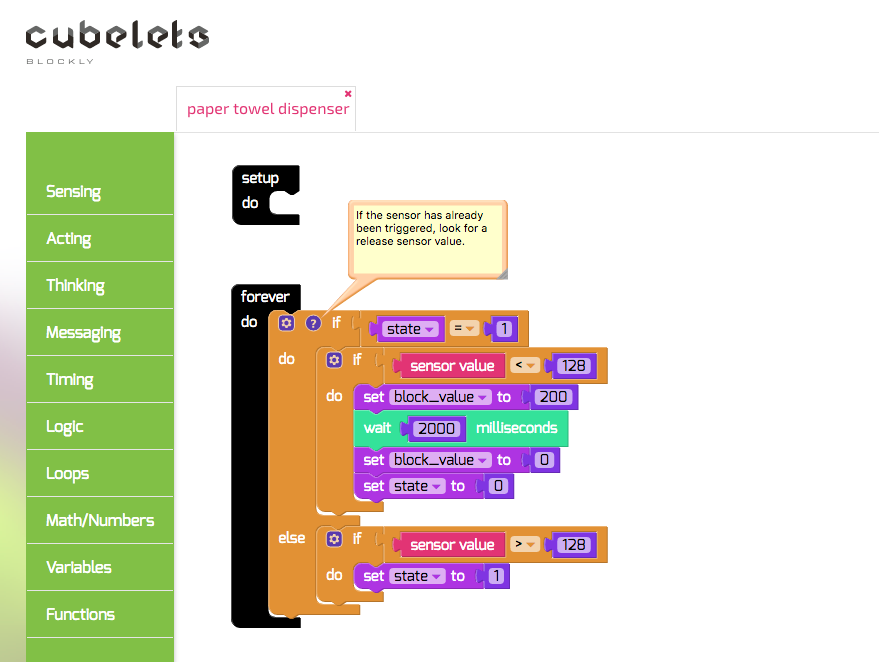
Looking good. Next I attached a couple of light sensors and tried programming the Drive Cubelet as sort of a lopsided state machine. If a light sensor has light, then drive toward it for a half second, slow down, and begin again. It worked! The little platform is successfully moving the cactus to the brightest sunshine. It’d be fun to add a couple of distance sensors to make sure that the plant car doesn’t bump into anything or fall down the stairs, and maybe some down-low glow, but I’m pretty happy with this for now.
Where were we, anyway? Right, Console! Console is a huge upgrade to the high-ceiling Cubelets experience. I was just doing distributed robot programming using multiple languages and leveraging inter-robot messaging schemes. And it’s for kids! It’s super cool to be able to sketch out a program in Blockly and then pop into C to understand the exact code that got created. There are lots of ways to look at the same algorithm, and lots of ways to understand things. Give Console a try and let us know what you build.
Then I flashed the code into a Drive Cubelet and saw this:
Looking good. Next I attached a couple of light sensors and tried programming the Drive Cubelet as sort of a lopsided state machine. If a light sensor has light, then drive toward it for a half second, slow down, and begin again. It worked! The little platform is successfully moving the cactus to the brightest sunshine. It’d be fun to add a couple of distance sensors to make sure that the plant car doesn’t bump into anything or fall down the stairs, and maybe some down-low glow, but I’m pretty happy with this for now.
Where were we, anyway? Right, Console! Console is a huge upgrade to the high-ceiling Cubelets experience. I was just doing distributed robot programming using multiple languages and leveraging inter-robot messaging schemes. And it’s for kids! It’s super cool to be able to sketch out a program in Blockly and then pop into C to understand the exact code that got created. There are lots of ways to look at the same algorithm, and lots of ways to understand things. Give Console a try and let us know what you build.
 There’s a Cubelet type out there, the old Bluetooth Cubelet, that is probably not bringing joy to a lot of people. It was hard to use and dropped connections a lot, so we replaced it with the totally awesome
There’s a Cubelet type out there, the old Bluetooth Cubelet, that is probably not bringing joy to a lot of people. It was hard to use and dropped connections a lot, so we replaced it with the totally awesome 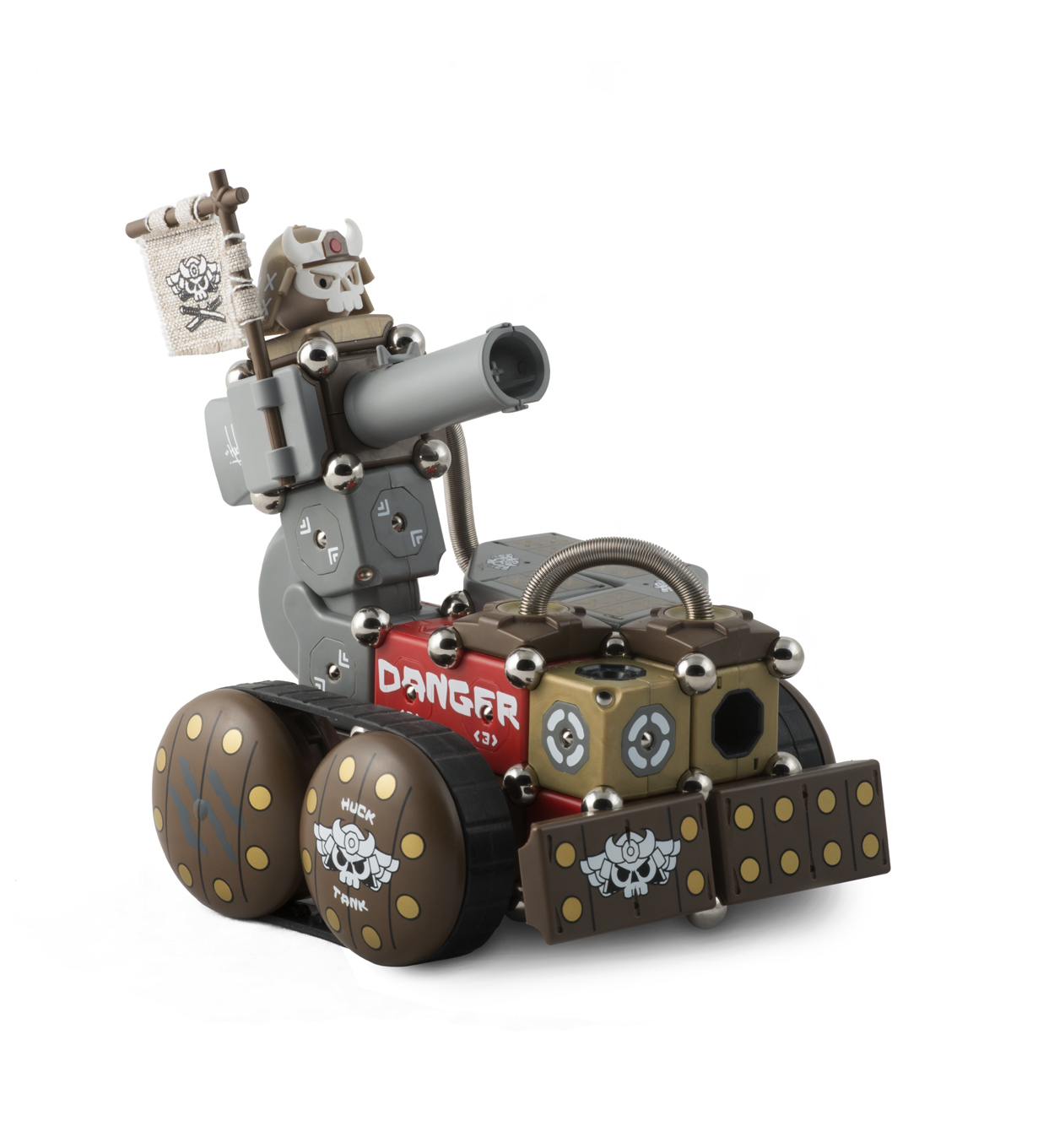 Only 186 Huck Tanks will ever be made. Most of those went to fulfill the MOSS Kickstarter campaign, and severely tested the limits of the modbot Production and Operations team. We’re good at building MOSS, but we set up an entire pad printing production line to do the graphics. Pad printing is basically printing using a rubber stamp-ish tool. Anyway, there are ninety-four different “hits” from the pad printer in a single Huck Tank, and when we got into it, we realized that we had vastly underestimated the amount of time it would take to manufacture these beauties. Fast forward to today, and we’ve built and printed a final run of 55 MOSS Huck Tanks, using the last of the little shogun heads and shields in existence.
Art collector? Robot enthusiast? Nerf assassin?
Only 186 Huck Tanks will ever be made. Most of those went to fulfill the MOSS Kickstarter campaign, and severely tested the limits of the modbot Production and Operations team. We’re good at building MOSS, but we set up an entire pad printing production line to do the graphics. Pad printing is basically printing using a rubber stamp-ish tool. Anyway, there are ninety-four different “hits” from the pad printer in a single Huck Tank, and when we got into it, we realized that we had vastly underestimated the amount of time it would take to manufacture these beauties. Fast forward to today, and we’ve built and printed a final run of 55 MOSS Huck Tanks, using the last of the little shogun heads and shields in existence.
Art collector? Robot enthusiast? Nerf assassin?