
.png)

Robot Recipes
See All Robots or Build Your OwnBigLamp
By: Tomek Wierzbicki
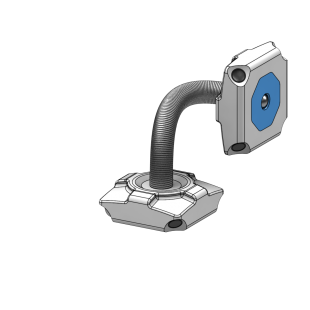
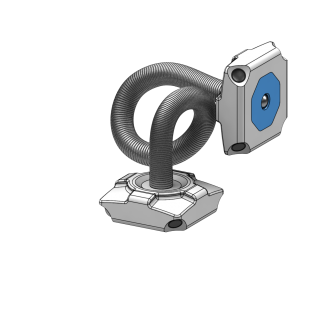
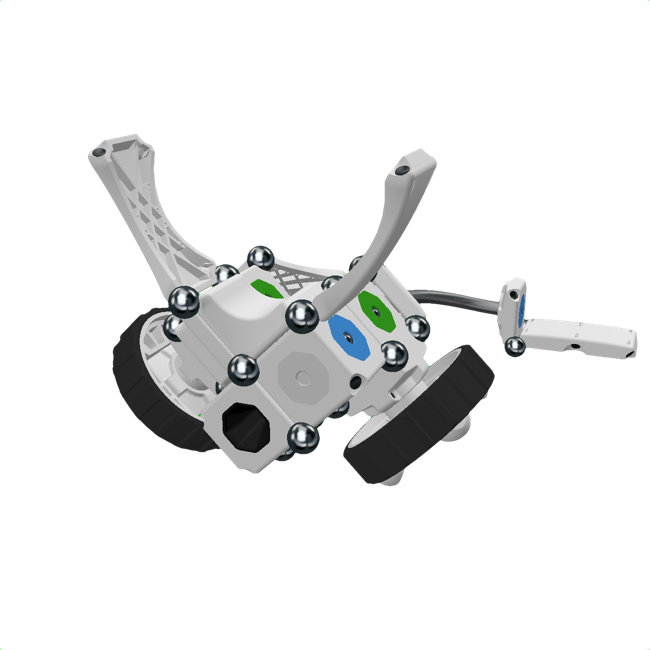
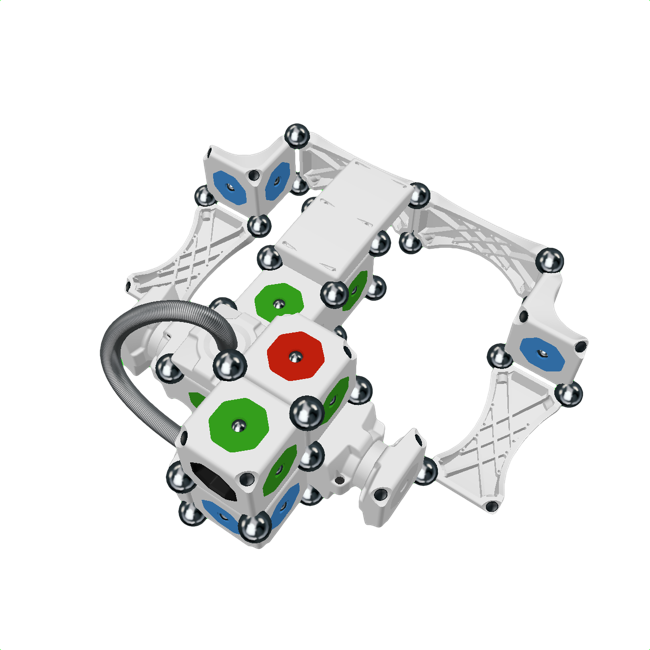
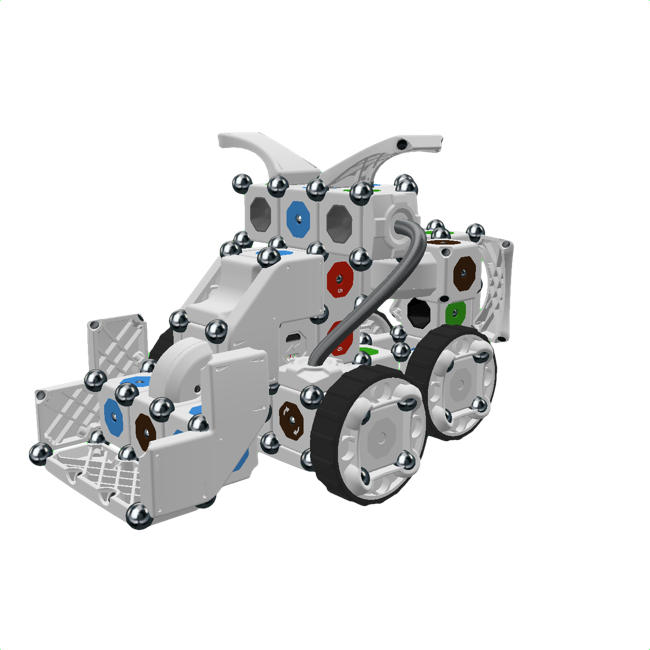
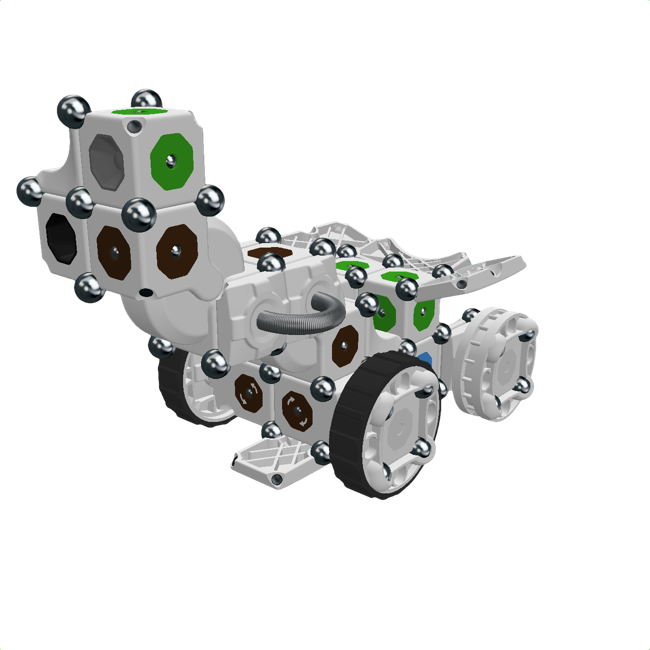
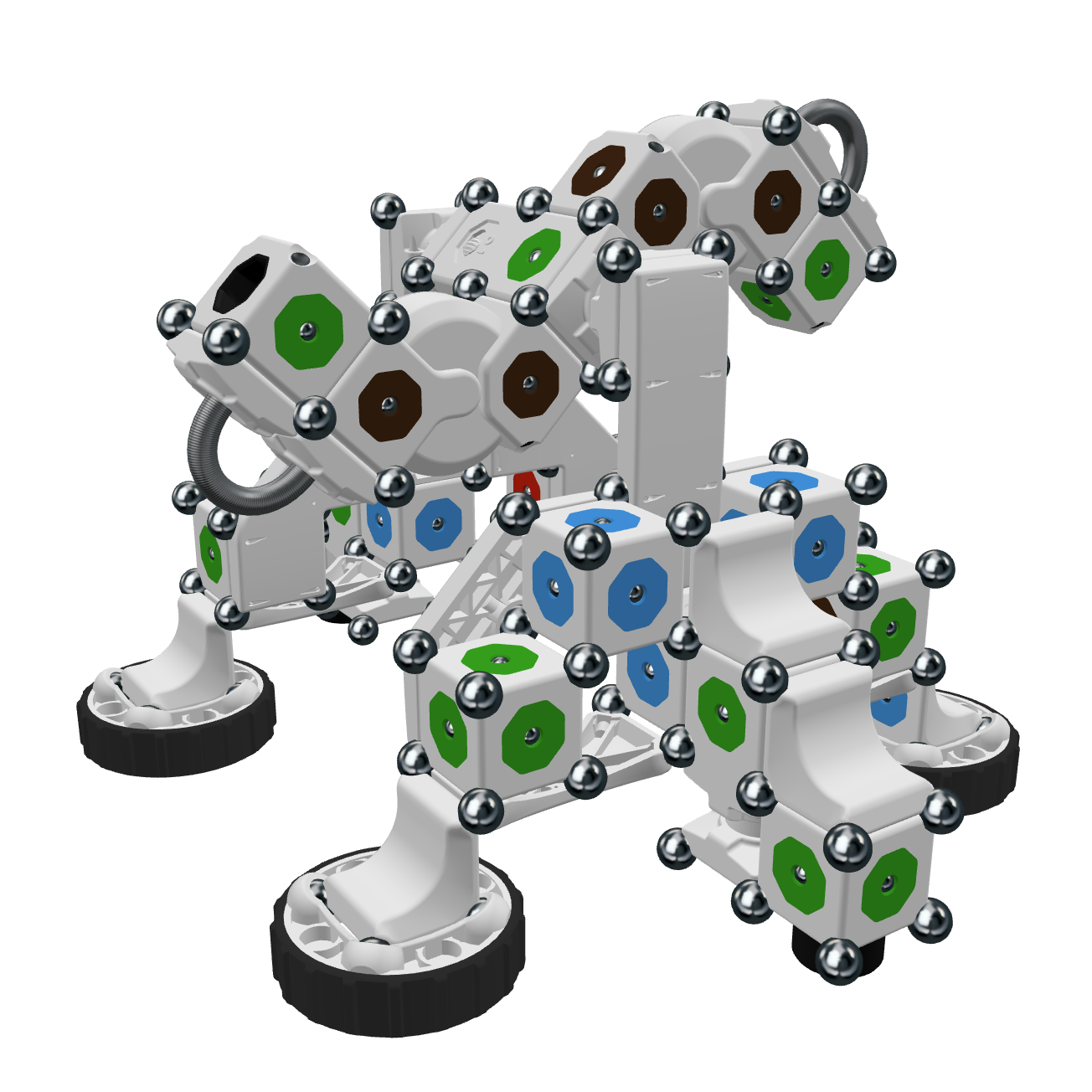
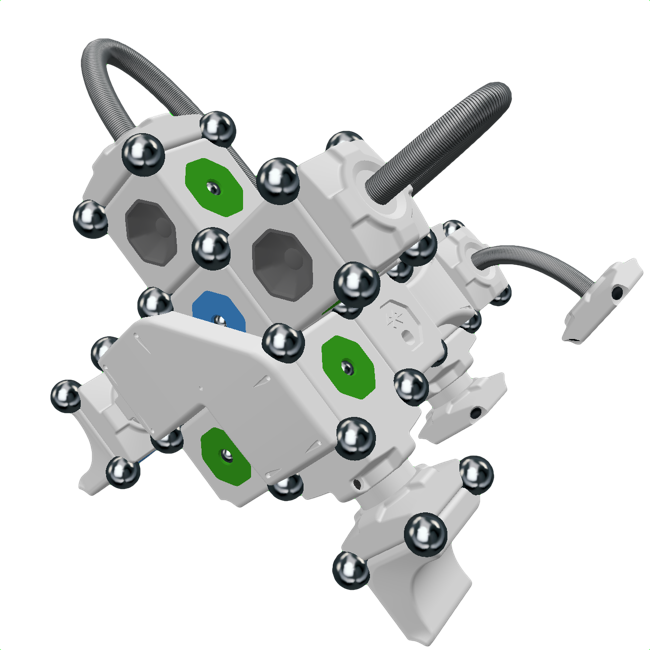
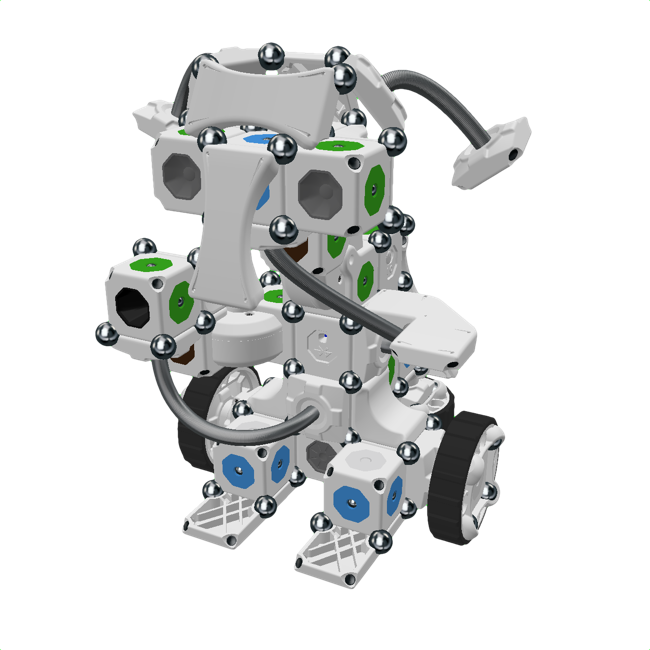
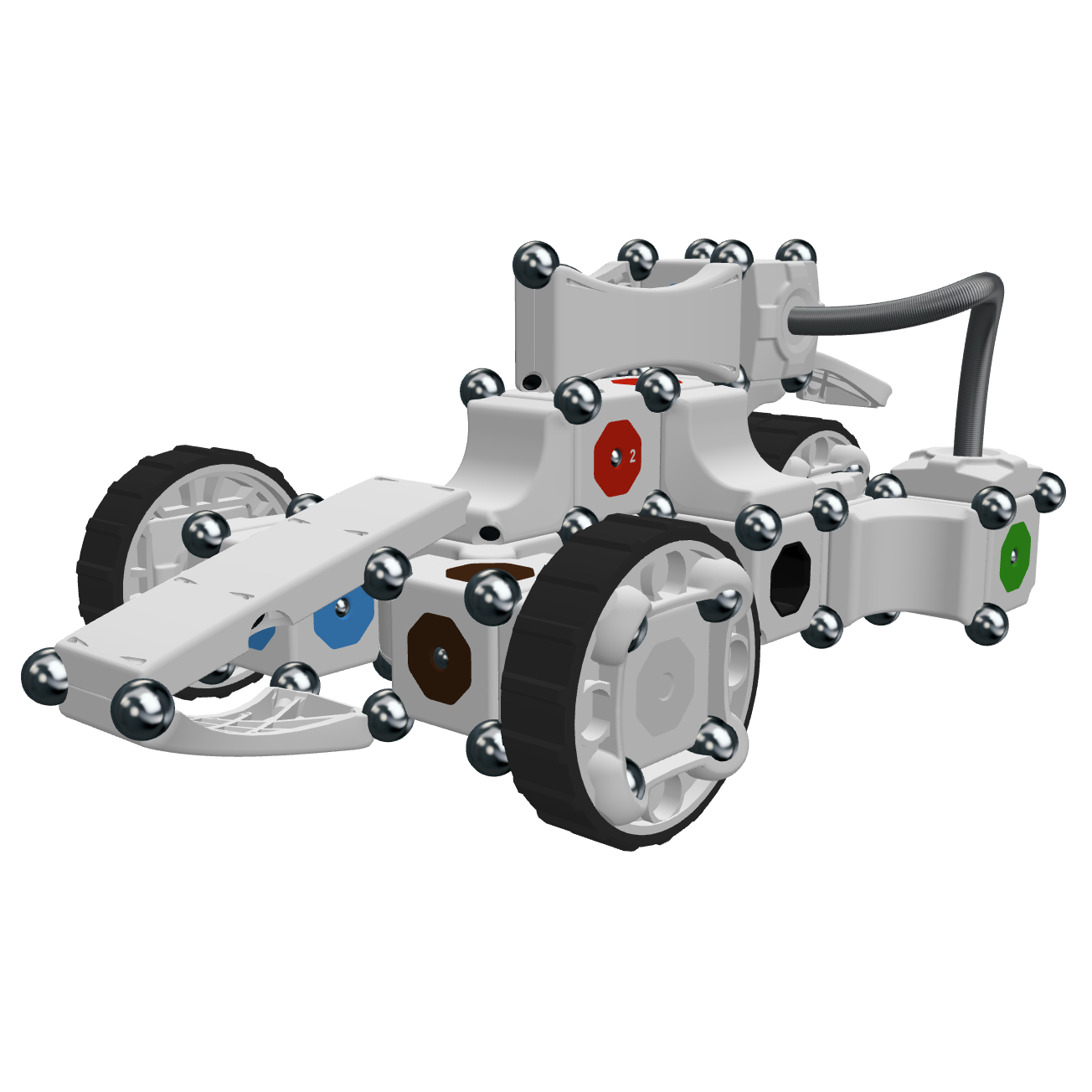
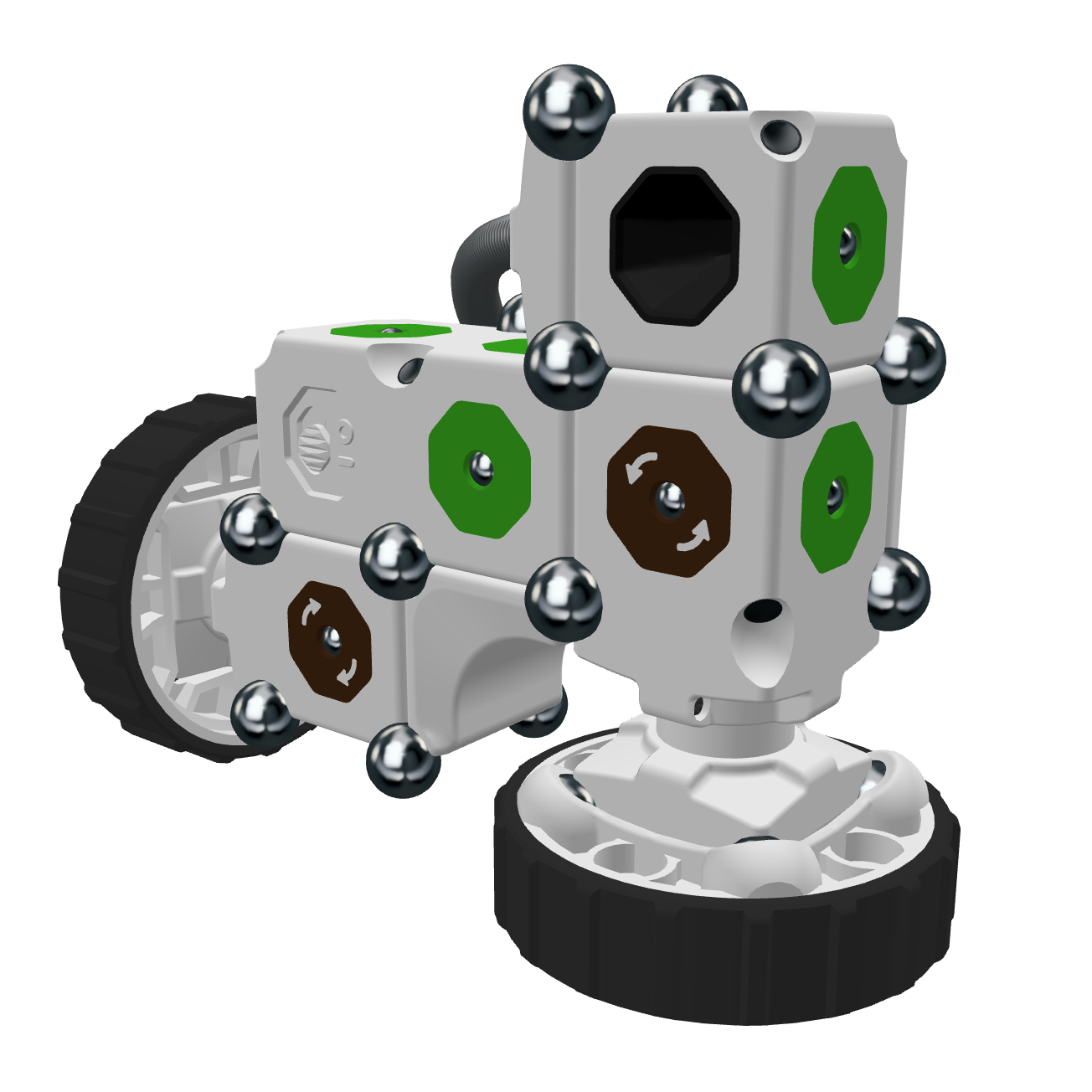
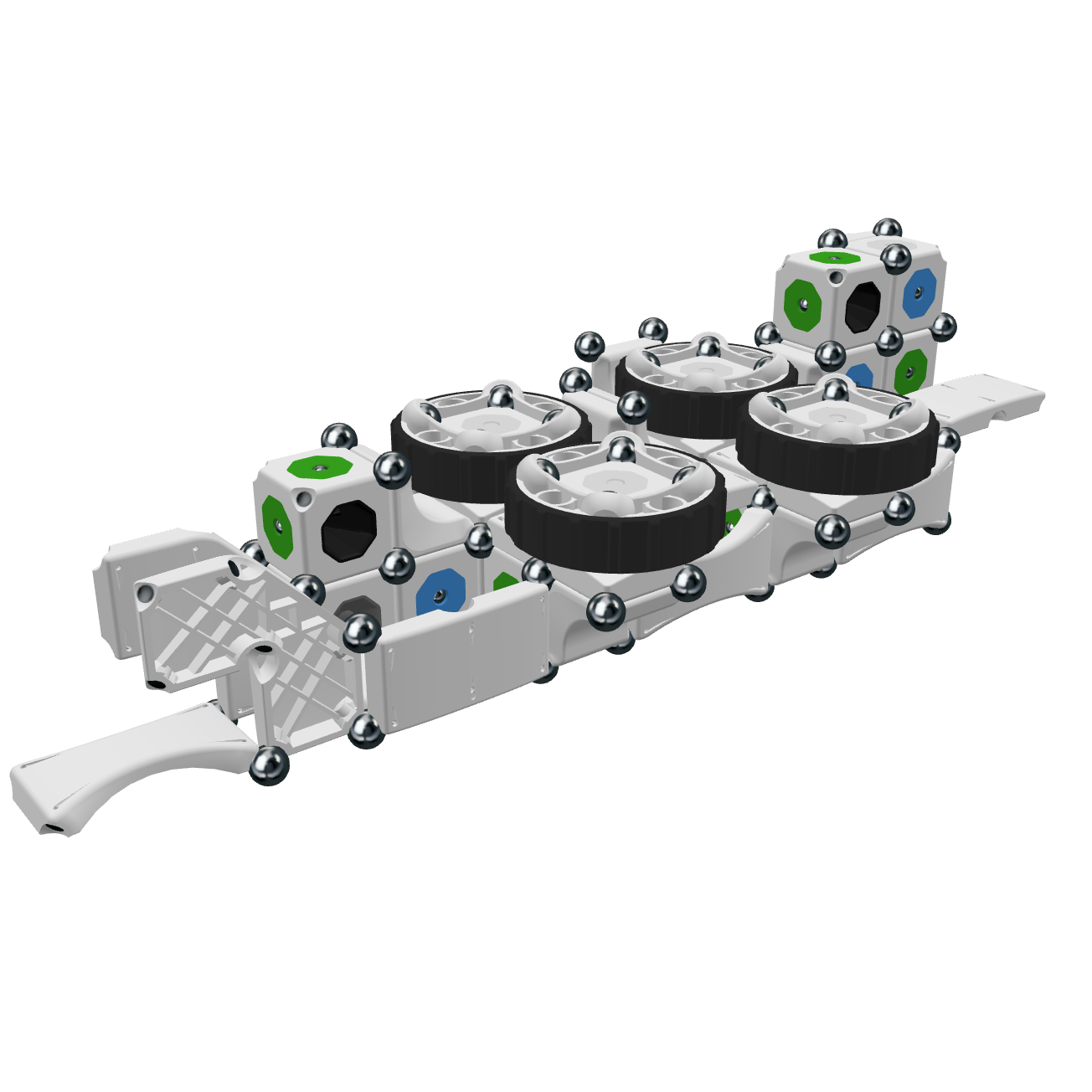
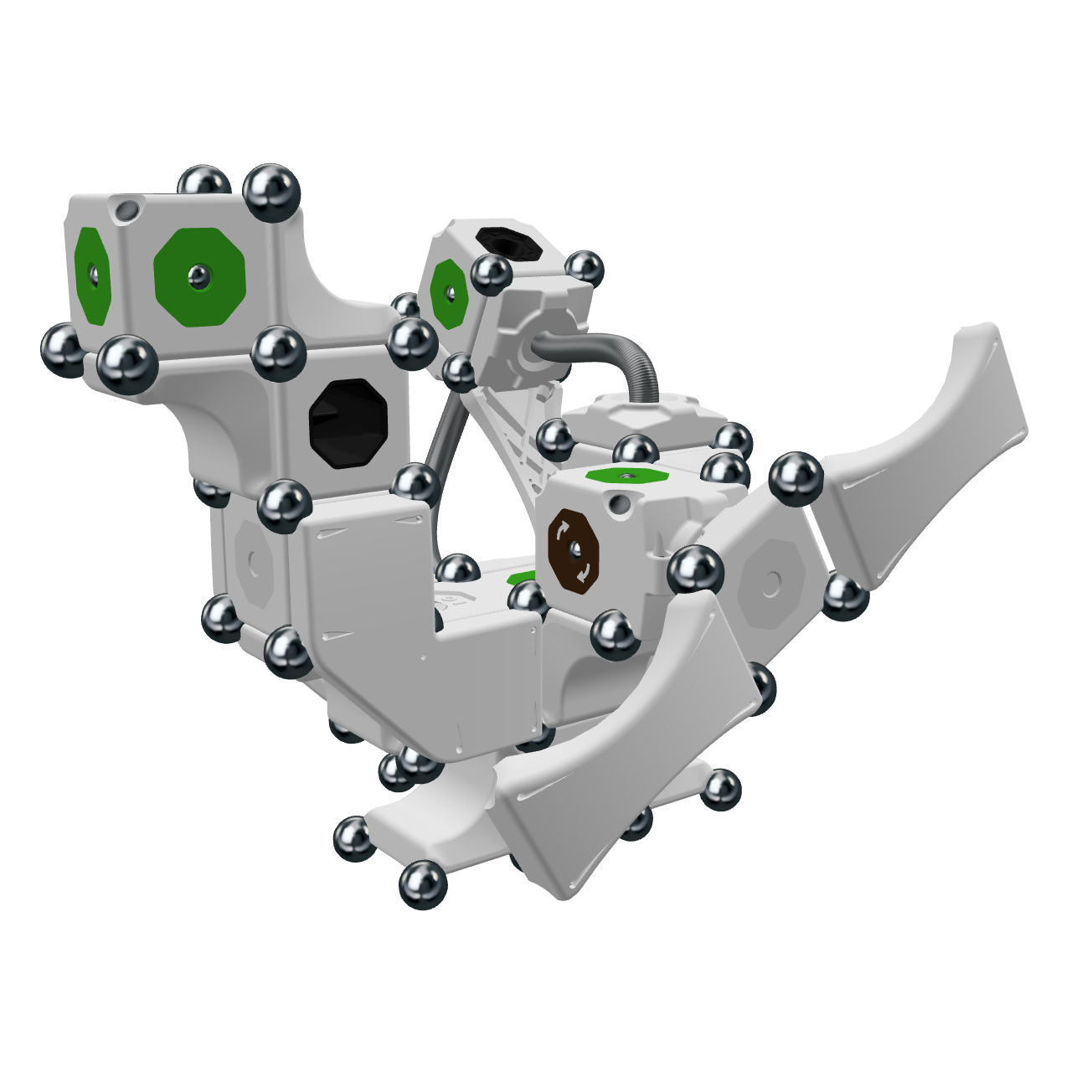
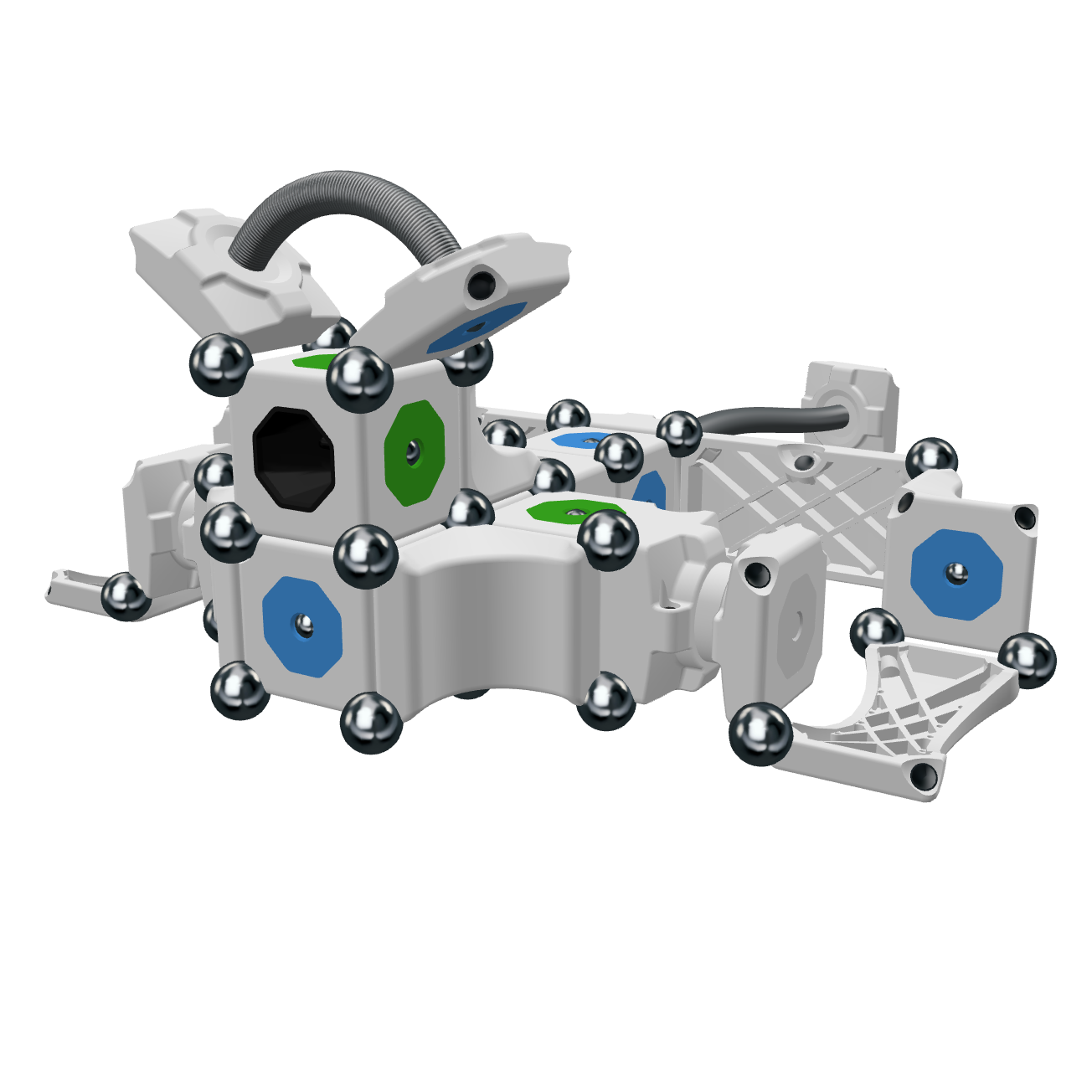
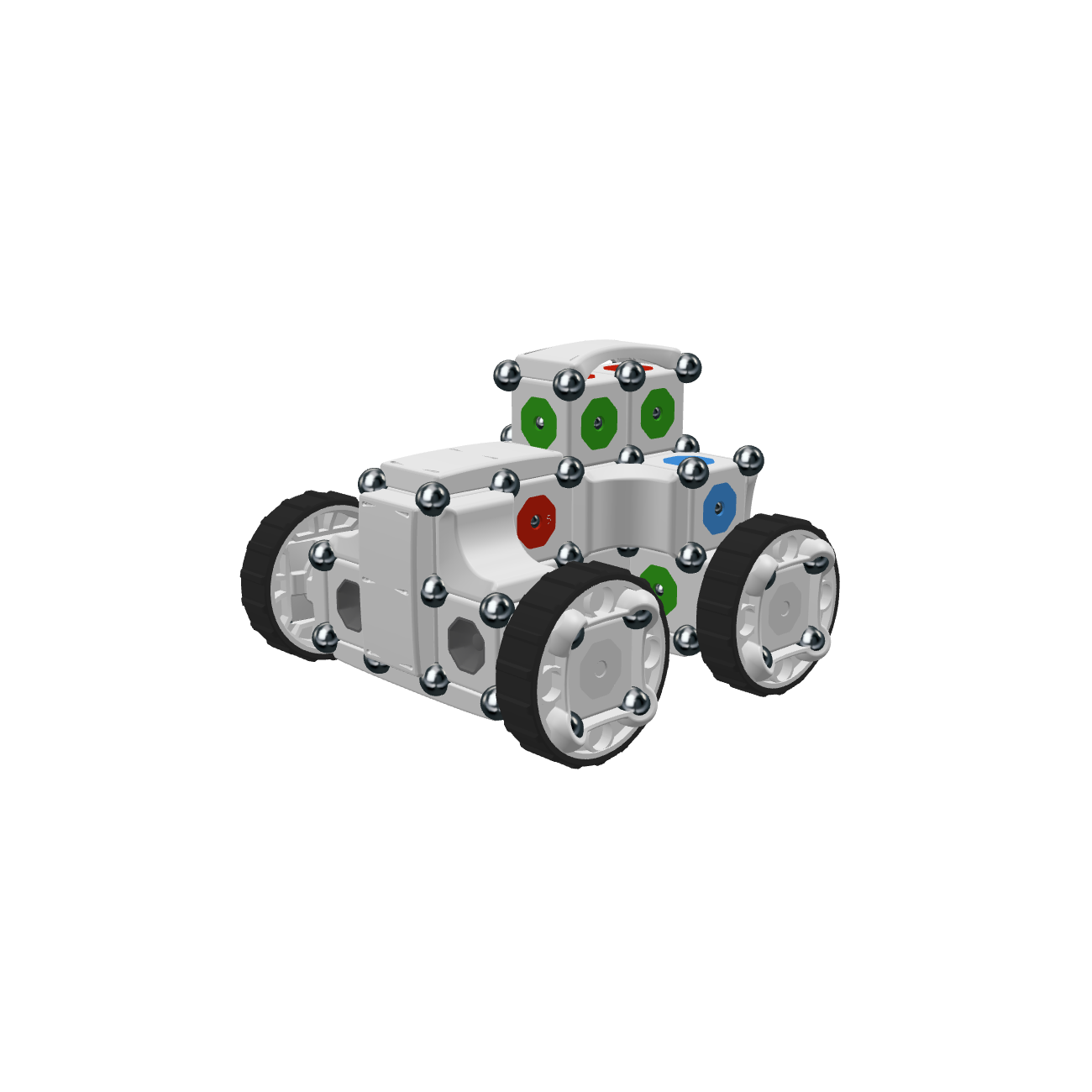
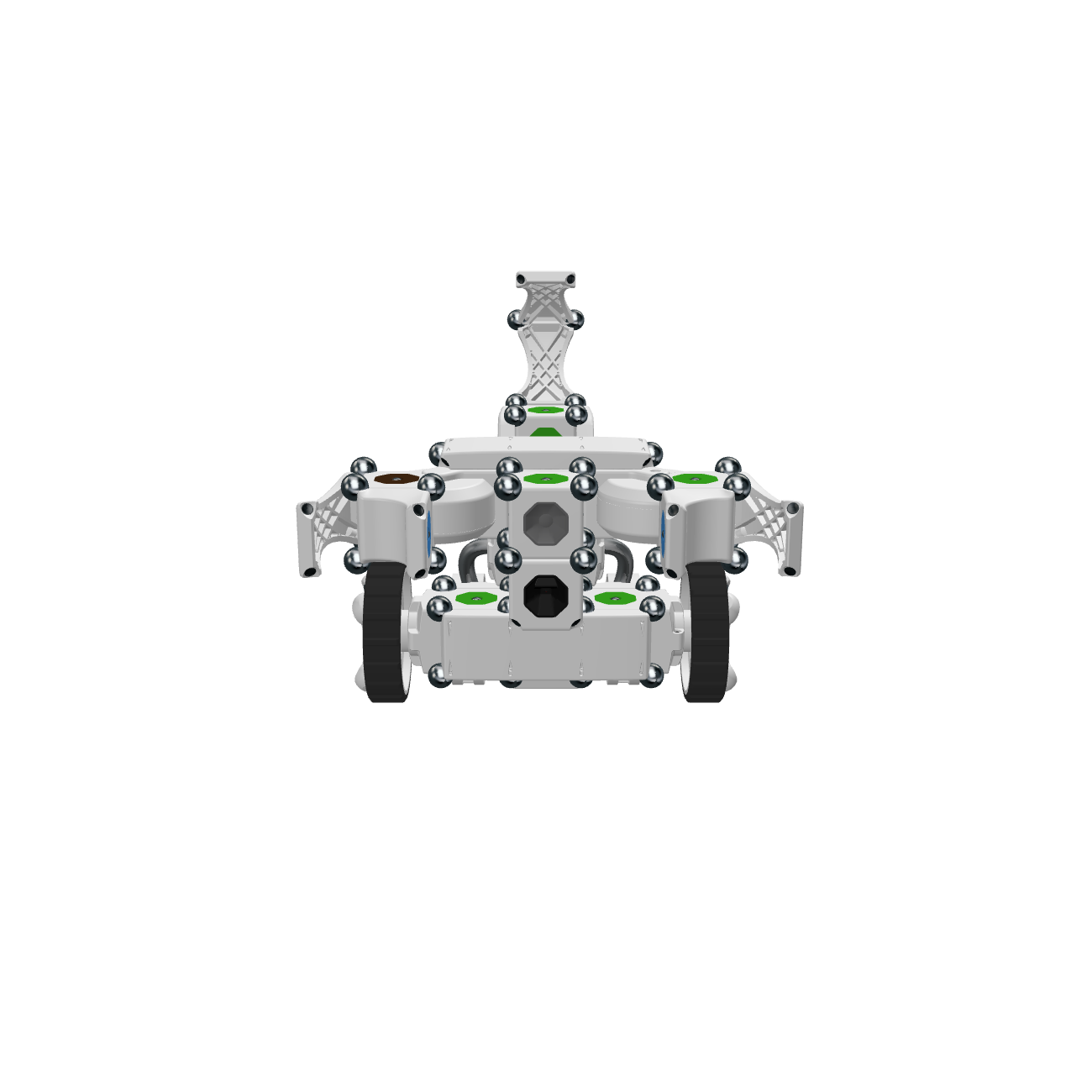
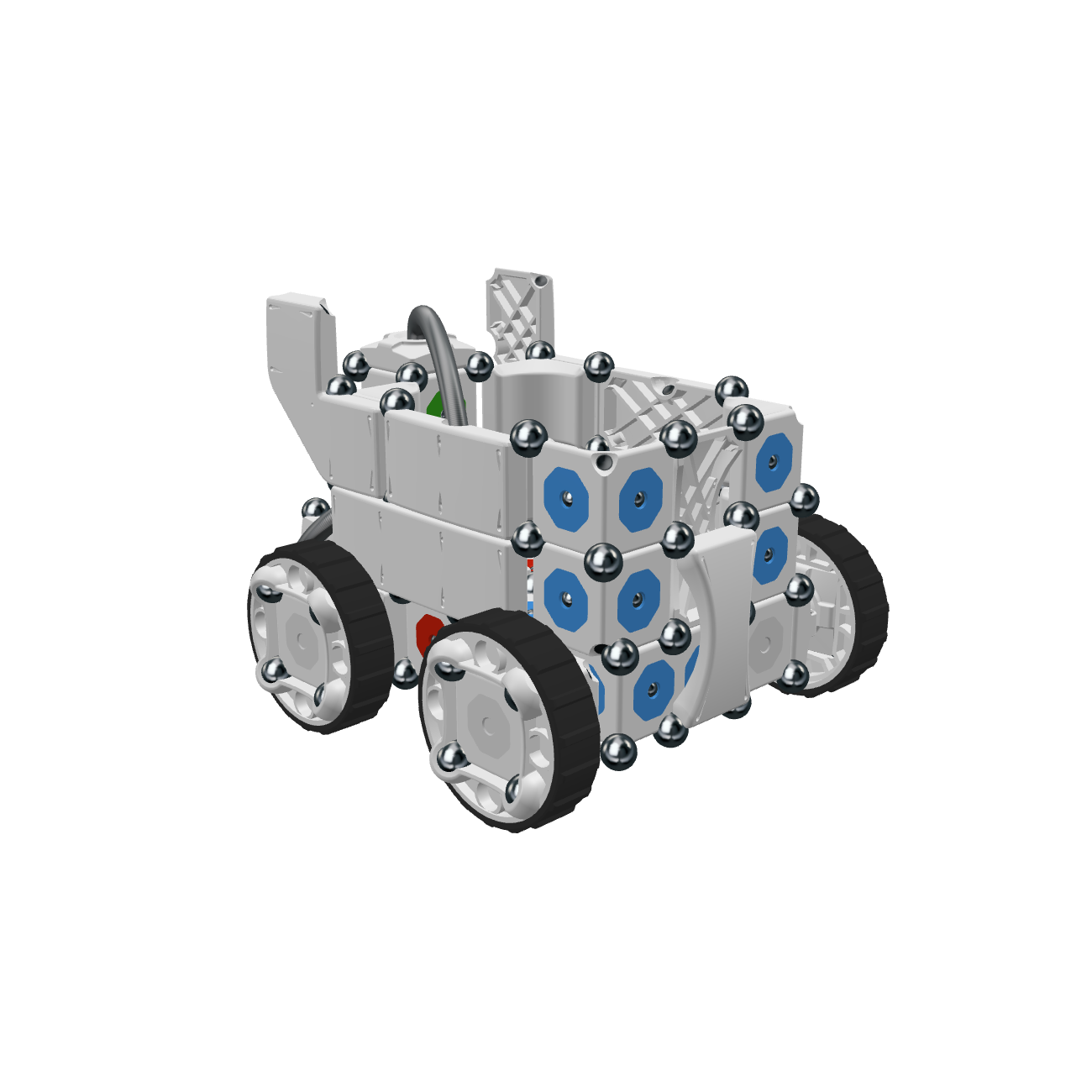
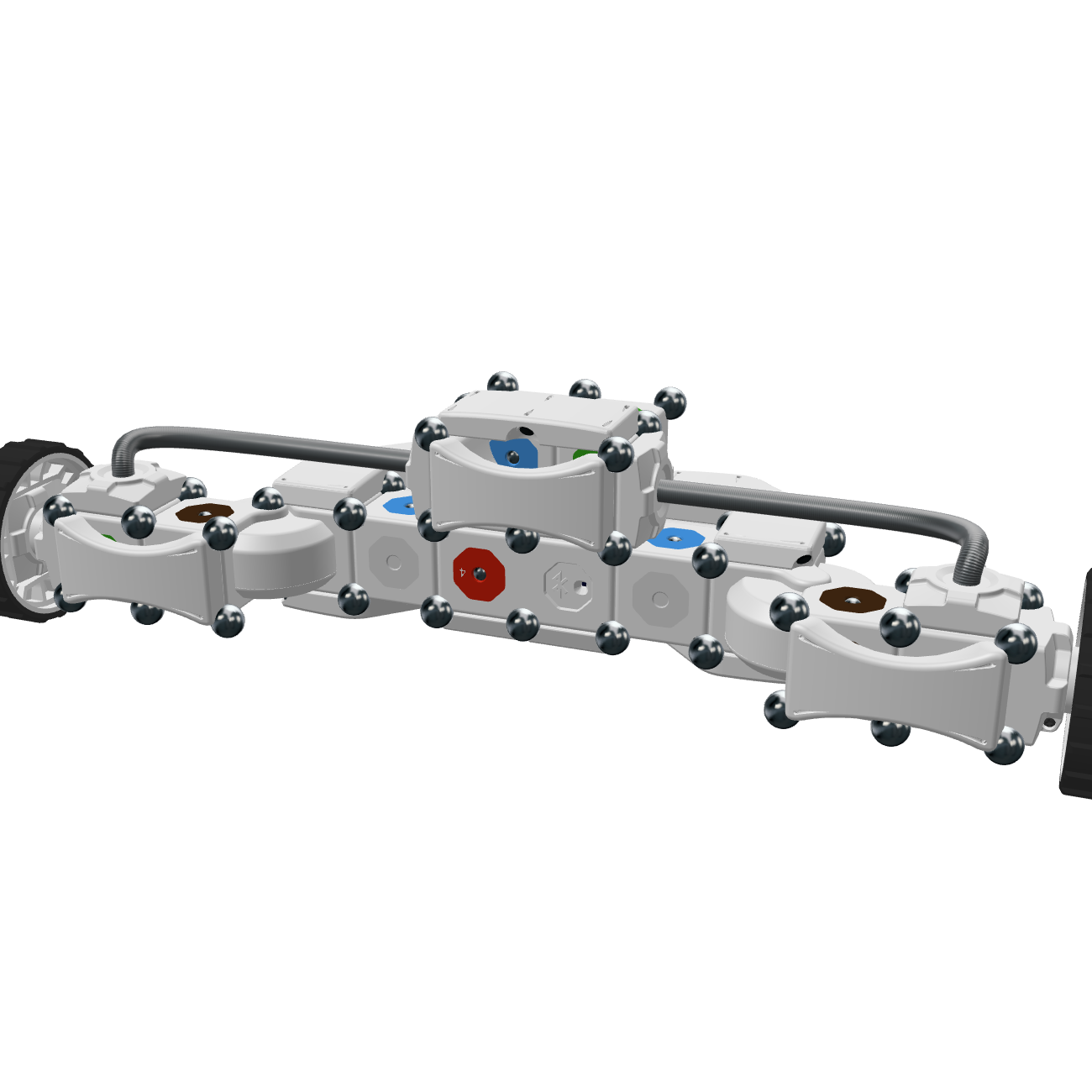
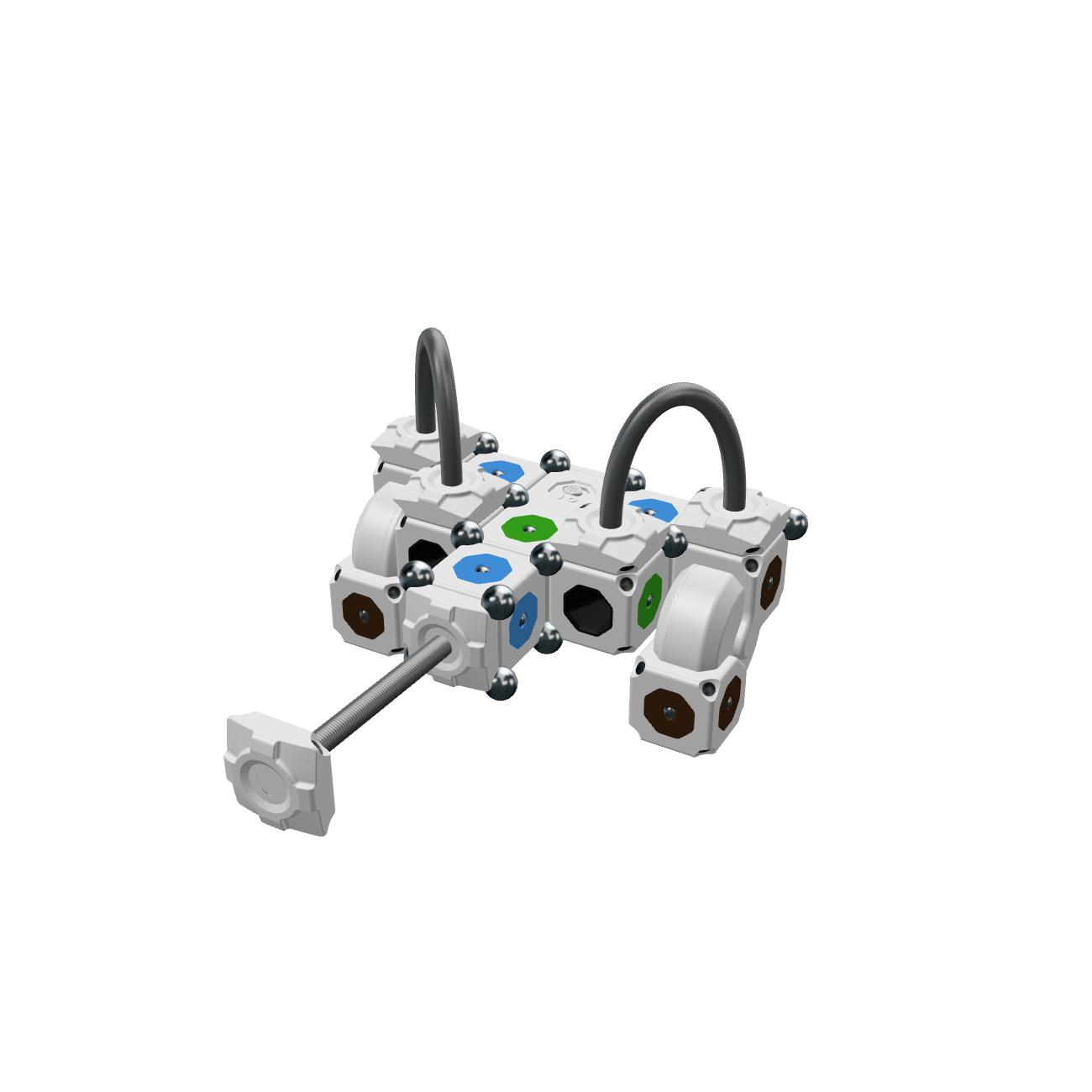
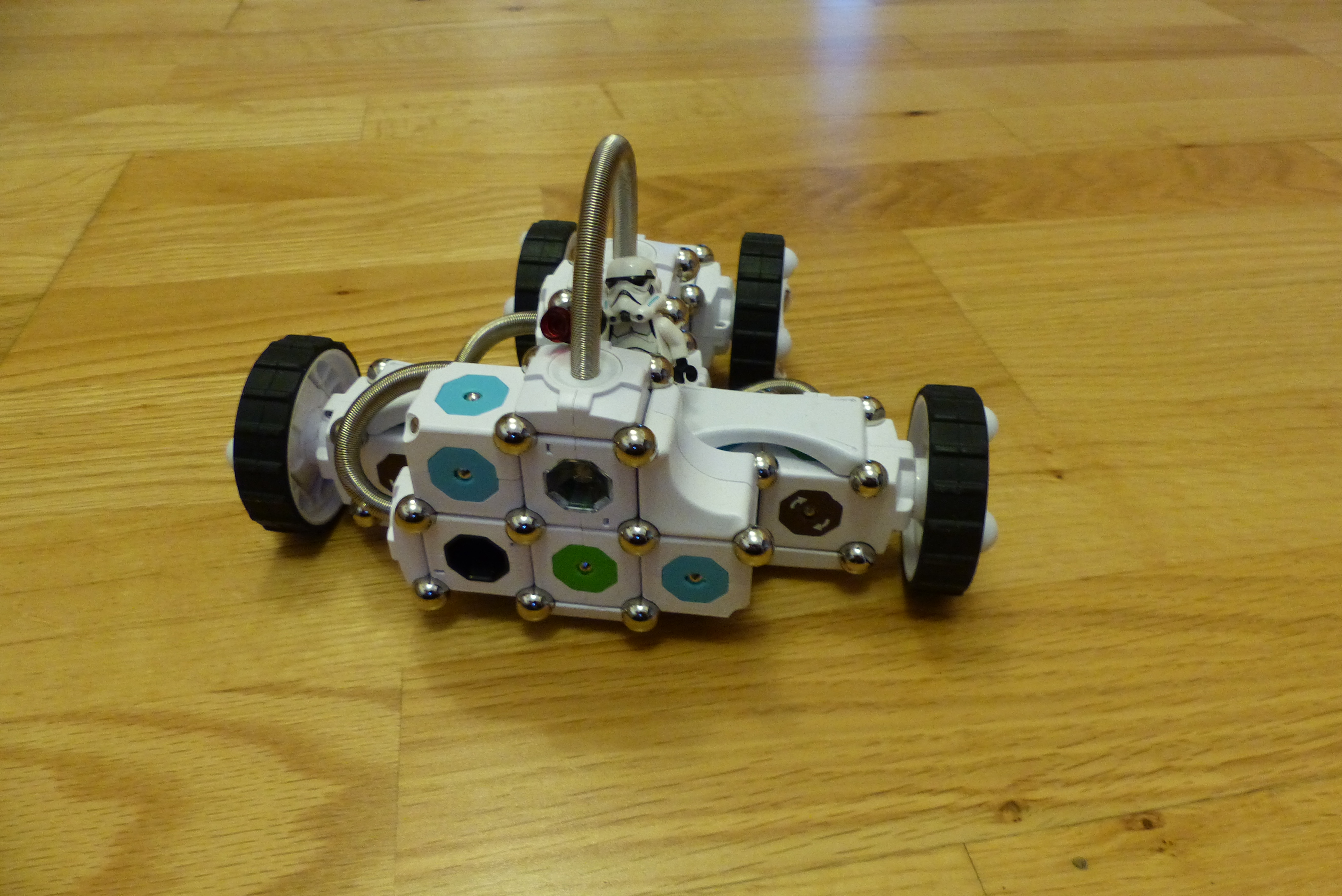
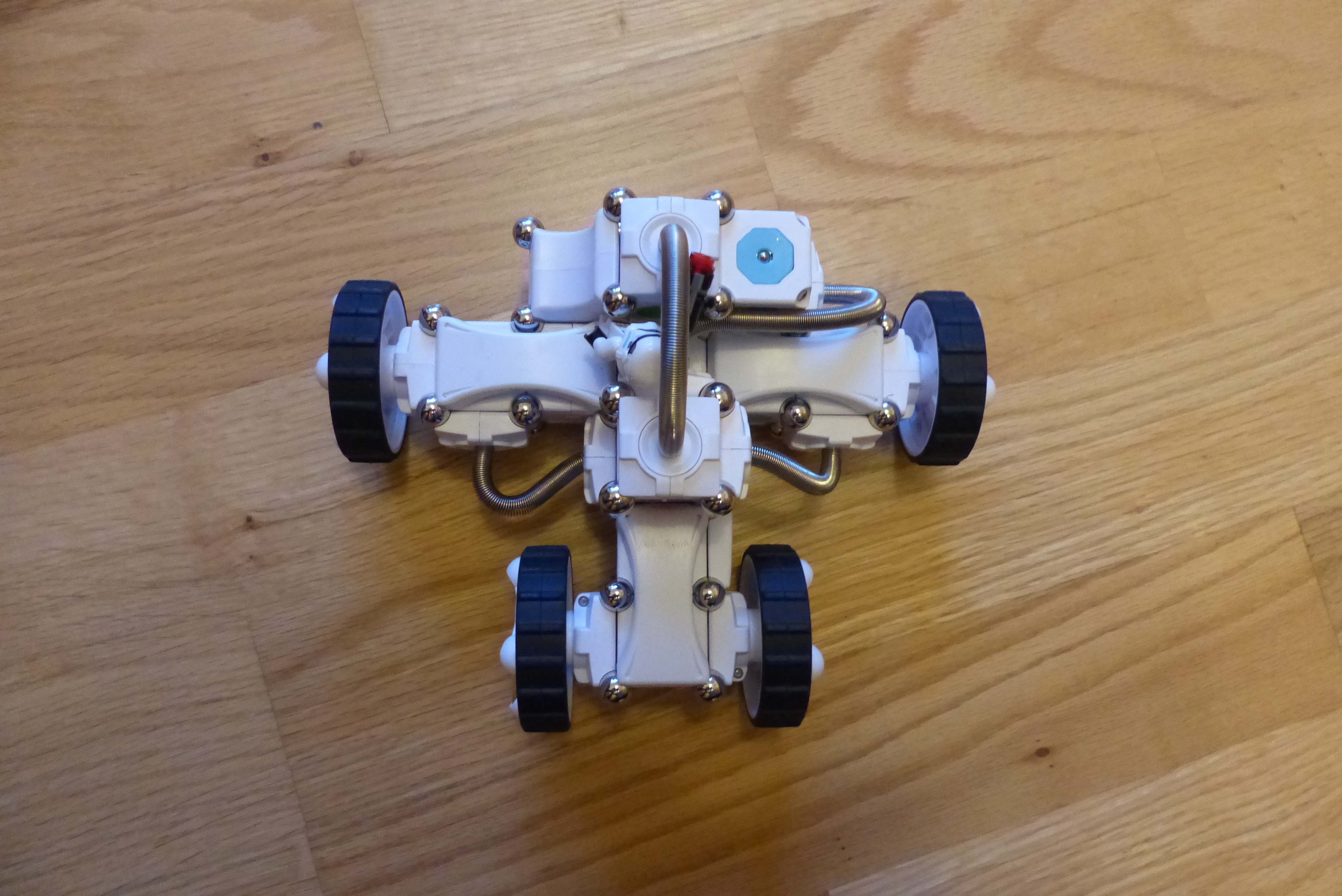
BigLamp is a MOSS robot that can explore a space or maze. It can drive quickly, but also turn in narrow spaces.
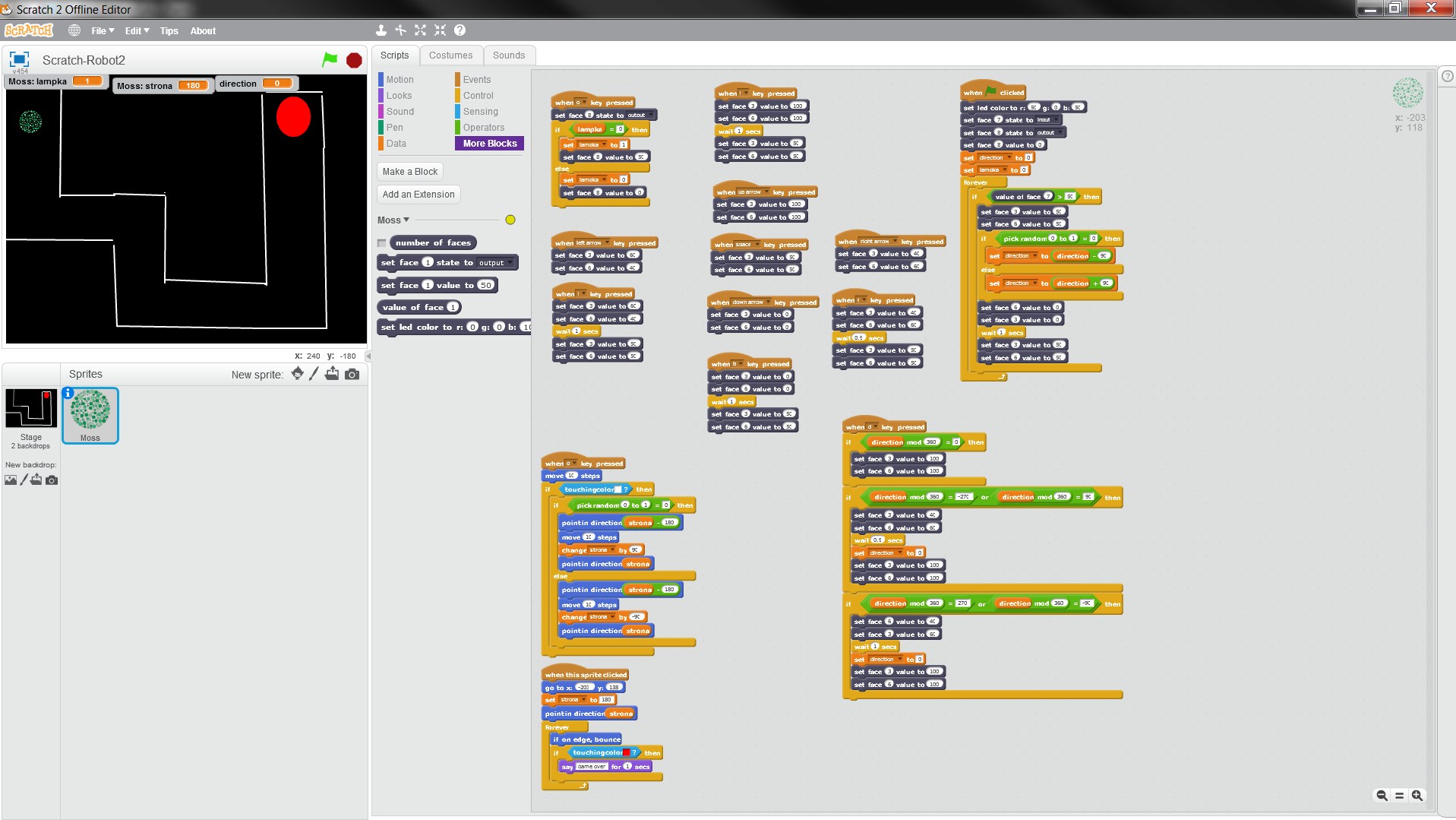
BigLamp can be controlled by a MOSS Scratch program. The program is available here: https://drive.google.com/open?id=0B4GrD-gJt7sWb1FXMWNKaEVDUkU
BigLamp is controlled using the following keys:
- Flag: initializes control variables and proximity sensor settings
- Space: stops the robot
- Arrow up: starts forward movement
- Arrow down: starts backward movement
- Arrow left: starts counterclockwise rotation
- Arrow right: starts clockwise rotation
- "f": move forward for 1 second and stop
- "b": move backward for 1 second and stop
- "l": turn counterclockwise by approx. 90 degrees
- "r" turn clockwise by approx. 90 degrees
- "o": turn lamp on and off
- "d": start moving in random direction: forward, right or left
BigLamp has a proximity sensor that stops the robot when it approaches an obstacle.
BigLamp then moves back for 1 second. Then, the program chooses a new random direction for the next movement. Together with the "d" key, this allows BigLamp to move through a maze. You move through the maze by repeatedly pressing the "d" key.
In the Scratch program, when the sprite is clicked, the sprite moves to an initial location. The "g" key can be used to test a simple program for moving in a maze on the sprite.
BigLamp was built and programmed by Tomek. Tomek is 8 years and 3 months old (May, 2017).