 Only 186 Huck Tanks will ever be made. Most of those went to fulfill the MOSS Kickstarter campaign, and severely tested the limits of the modbot Production and Operations team. We’re good at building MOSS, but we set up an entire pad printing production line to do the graphics. Pad printing is basically printing using a rubber stamp-ish tool. Anyway, there are ninety-four different “hits” from the pad printer in a single Huck Tank, and when we got into it, we realized that we had vastly underestimated the amount of time it would take to manufacture these beauties. Fast forward to today, and we’ve built and printed a final run of 55 MOSS Huck Tanks, using the last of the little shogun heads and shields in existence.
Art collector? Robot enthusiast? Nerf assassin? Grab one of the last Huck Tanks while you can. Here’s a teaser video from three years ago showing a couple of different prototypes (sans shogun head), and the raw power of the Nerf cannon.
Only 186 Huck Tanks will ever be made. Most of those went to fulfill the MOSS Kickstarter campaign, and severely tested the limits of the modbot Production and Operations team. We’re good at building MOSS, but we set up an entire pad printing production line to do the graphics. Pad printing is basically printing using a rubber stamp-ish tool. Anyway, there are ninety-four different “hits” from the pad printer in a single Huck Tank, and when we got into it, we realized that we had vastly underestimated the amount of time it would take to manufacture these beauties. Fast forward to today, and we’ve built and printed a final run of 55 MOSS Huck Tanks, using the last of the little shogun heads and shields in existence.
Art collector? Robot enthusiast? Nerf assassin? Grab one of the last Huck Tanks while you can. Here’s a teaser video from three years ago showing a couple of different prototypes (sans shogun head), and the raw power of the Nerf cannon.
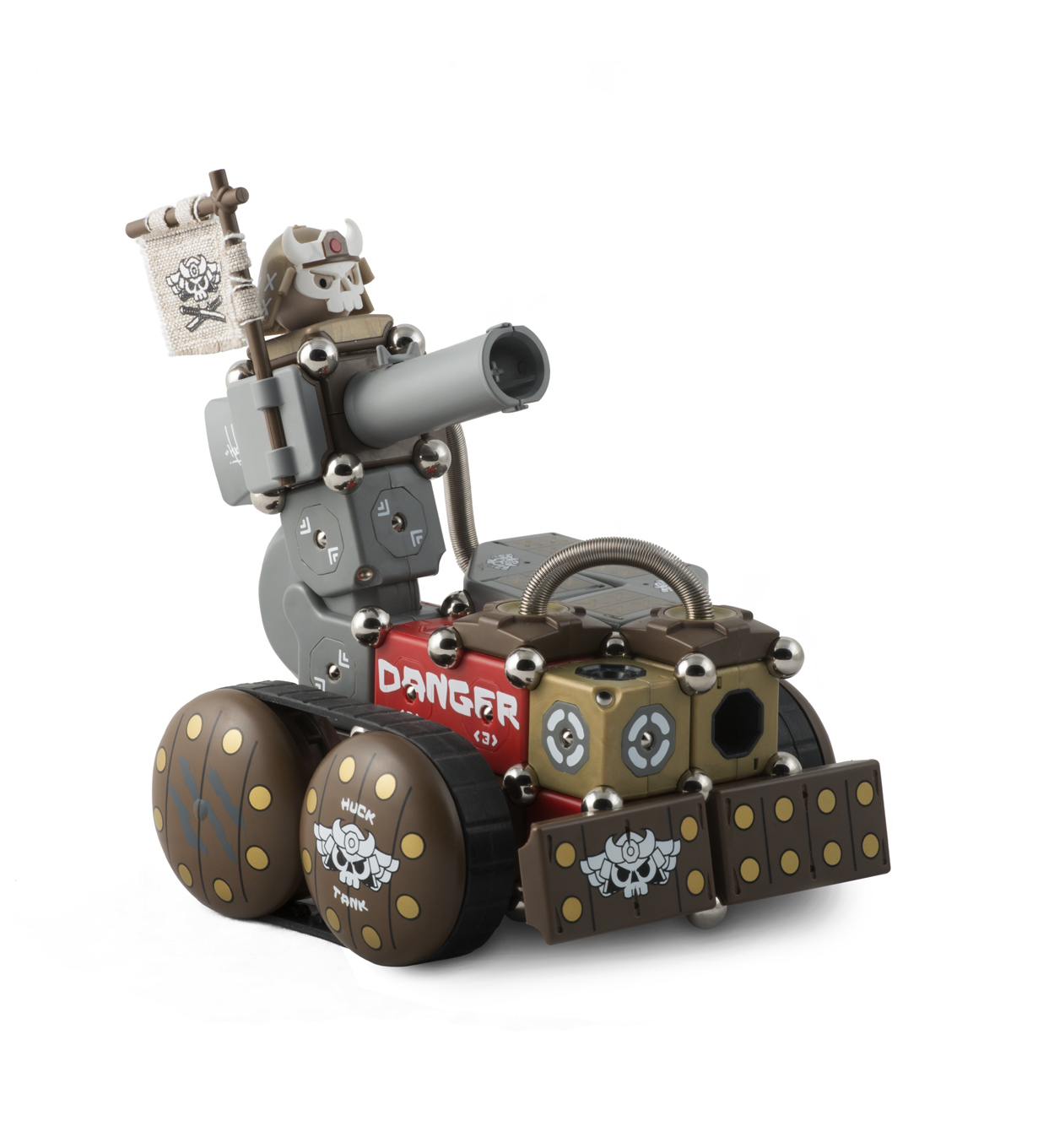
One of the Modular Robotics projects I’m most proud of is the MOSS Huck Tank. It’s a MOSS kit designed with Huck Gee, one of my favorite artists. It’s gorgeous, and you can drive it around with your phone and shoot Nerf darts remotely!
Only 186 Huck Tanks will ever be made. Most of those went to fulfill the MOSS Kickstarter campaign, and severely tested the limits of the modbot Production and Operations team. We’re good at building MOSS, but we set up an entire pad printing production line to do the graphics. Pad printing is basically printing using a rubber stamp-ish tool. Anyway, there are ninety-four different “hits” from the pad printer in a single Huck Tank, and when we got into it, we realized that we had vastly underestimated the amount of time it would take to manufacture these beauties. Fast forward to today, and we’ve built and printed a final run of 55 MOSS Huck Tanks, using the last of the little shogun heads and shields in existence.
Art collector? Robot enthusiast? Nerf assassin? Grab one of the last Huck Tanks while you can. Here’s a teaser video from three years ago showing a couple of different prototypes (sans shogun head), and the raw power of the Nerf cannon.
Only 186 Huck Tanks will ever be made. Most of those went to fulfill the MOSS Kickstarter campaign, and severely tested the limits of the modbot Production and Operations team. We’re good at building MOSS, but we set up an entire pad printing production line to do the graphics. Pad printing is basically printing using a rubber stamp-ish tool. Anyway, there are ninety-four different “hits” from the pad printer in a single Huck Tank, and when we got into it, we realized that we had vastly underestimated the amount of time it would take to manufacture these beauties. Fast forward to today, and we’ve built and printed a final run of 55 MOSS Huck Tanks, using the last of the little shogun heads and shields in existence.
Art collector? Robot enthusiast? Nerf assassin? Grab one of the last Huck Tanks while you can. Here’s a teaser video from three years ago showing a couple of different prototypes (sans shogun head), and the raw power of the Nerf cannon.
