You may have noticed that we’re out of stock on almost everything. If you’re looking around on the site and you can’t order what you need, I’m sorry! All of the tiny robots will be back in stock soon and we’re thinking that the holiday rush has subsided and that we’ll be able to build a little inventory shortly. Just as I’m typing this, in fact, a few MOSS kits are coming off the assembly line and getting put back in stock on the site. Cubelets on Friday.
We weren’t able to manufacture as many robots as we had hoped to this year. We had to decline quite a few orders from our resellers to make sure that we had enough kits in stock for people to order on modrobotics.com, and we had to put off a relationship with two big electronics stores until next year because we just couldn’t build the sheer volume of tiny robots that they needed. We left money on the table, so to speak, and that missed opportunity hurts.
Modbot can stand the pain. Manufacturing our own products here in Boulder is hard and we’ve pushed through a lot of challenges (oh, say, bad raw materials, broken industrial machines, surprise tolerance stack craziness, plastic parts seizures by Customs, for example) that might not have presented themselves if we just had a Chinese contract manufacturer make our stuff for us like everyone else does. I’d rather we were in this position than in the opposite position of having made a lot of stuff that nobody wants to buy.
Our whole mission revolves around broad impact. Modular Robotics is all about enabling as many people as possible to experience designing with complex systems and emergence (by playing with tiny robots) as possible. And so, while we regret not being able to manufacture (and sell) as many robots as we might have been able to, I’m pleased to note that we did, in fact, make and distribute 5x as many robots as we did in 2013. And we had a lot of fun doing it! Thanks for making modbot possible.
All posts by Eric Schweikardt
Woo! I’m pleased to announce the new Battery Cubelet. We’ve been working on designing and developing it for quite a while. The new Battery Cubelet has a lithium polymer battery with micro USB charging, so you no longer have to remove the cells from the Cubelet to charge it like with the old version.
 The new Battery Cubelet lasts about 30% longer than the old one and it charges more quickly too. Turns out it’s also a lot easier for us to manufacture: we generate fewer scrapped and wasted parts with the new design than with the old.
Back in 2010 when we launched the old Battery Cubelet, most of the little robots made their way to science centers, children’s museums, and schools where they were often in use for all-day sessions. We chose to make the battery cells removable so that these places could buy a bunch of extra cells to keep Cubelets going for a huge day instead of having to buy a bunch of extra Battery Cubelets. It turned out, though, that swapping batteries in and out of Cubelets was just straight annoying and the chargers were clunky to use and slow.
One of the more unique aspects of Cubelets is that it’s a distributed system. When you build a typical robot, you build a plastic and metal body, and then you switch your attention to a laptop and program the brain. With Cubelets, you snap together a bunch of little brain modules that all work together and form a body. If you’re OK with carrying the metaphor a little further, Cubelets most certainly do have a heart: every robot needs a Battery Cubelet to provide power — without it, a construction is dead. That’s why this upgrade is such a big deal.
The new Battery Cubelet is available now on it’s own, as part of the SIX kit, and as part of the big TWENTY kit. Psyched! We didn’t launch many new Cubelets this year, but the new Battery Cubelet is a big one.
The new Battery Cubelet lasts about 30% longer than the old one and it charges more quickly too. Turns out it’s also a lot easier for us to manufacture: we generate fewer scrapped and wasted parts with the new design than with the old.
Back in 2010 when we launched the old Battery Cubelet, most of the little robots made their way to science centers, children’s museums, and schools where they were often in use for all-day sessions. We chose to make the battery cells removable so that these places could buy a bunch of extra cells to keep Cubelets going for a huge day instead of having to buy a bunch of extra Battery Cubelets. It turned out, though, that swapping batteries in and out of Cubelets was just straight annoying and the chargers were clunky to use and slow.
One of the more unique aspects of Cubelets is that it’s a distributed system. When you build a typical robot, you build a plastic and metal body, and then you switch your attention to a laptop and program the brain. With Cubelets, you snap together a bunch of little brain modules that all work together and form a body. If you’re OK with carrying the metaphor a little further, Cubelets most certainly do have a heart: every robot needs a Battery Cubelet to provide power — without it, a construction is dead. That’s why this upgrade is such a big deal.
The new Battery Cubelet is available now on it’s own, as part of the SIX kit, and as part of the big TWENTY kit. Psyched! We didn’t launch many new Cubelets this year, but the new Battery Cubelet is a big one.
The new Battery Cubelet lasts about 30% longer than the old one and it charges more quickly too. Turns out it’s also a lot easier for us to manufacture: we generate fewer scrapped and wasted parts with the new design than with the old.
Back in 2010 when we launched the old Battery Cubelet, most of the little robots made their way to science centers, children’s museums, and schools where they were often in use for all-day sessions. We chose to make the battery cells removable so that these places could buy a bunch of extra cells to keep Cubelets going for a huge day instead of having to buy a bunch of extra Battery Cubelets. It turned out, though, that swapping batteries in and out of Cubelets was just straight annoying and the chargers were clunky to use and slow.
One of the more unique aspects of Cubelets is that it’s a distributed system. When you build a typical robot, you build a plastic and metal body, and then you switch your attention to a laptop and program the brain. With Cubelets, you snap together a bunch of little brain modules that all work together and form a body. If you’re OK with carrying the metaphor a little further, Cubelets most certainly do have a heart: every robot needs a Battery Cubelet to provide power — without it, a construction is dead. That’s why this upgrade is such a big deal.
The new Battery Cubelet is available now on it’s own, as part of the SIX kit, and as part of the big TWENTY kit. Psyched! We didn’t launch many new Cubelets this year, but the new Battery Cubelet is a big one. We’re finishing up the final preparations toward launching our most awesome product ever: the MOSS Huck Tank. I can’t wait until November.
The Huck Tank is the first in the MOSS Artist Series and is designed by Huck Gee. I’ve been in love with Huck’s work ever since seeing the first toys he did with Kidrobot, and I’m super-proud (and still slightly amazed) that he agreed to design a MOSS kit.
The Huck Tank kit has 32 MOSS blocks and is designed to be assembled into a little tank that drives around and shoots things with foam darts. This is a janky hand-painted prototype, but just look at it!

There are two different ways to play with the tank. In autonomous mode, it’ll drive around and avoid obstacles, firing its dart whenever it hears a double clap. Or, download the iOS/Android app and remote control the tank and turret. Of course, you can also build anything you want, or mix and match the Huck Tank modules with your normal MOSS modules to create huge foam dart shooting monster robots.
The white plastic frames that give shape to normal MOSS blocks are injection moulded at one of our suppliers in China. We’ve never been able to injection mould plastic parts in the USA; it’s just always been too expensive. Way too expensive, like we’d need to charge $100 more for a kit expensive. But things have changed: we’re manufacturing the plastic parts that are new in the Huck Tank at an injection moulder in the USA! In Colorado! The supplier is pretty awesome. They’re building the moulds out of aircraft aluminum instead of tool steel, and they should last plenty long. Easier machining in aluminum makes for USA moulds at a competitive (yes, it’s still more expensive, but not double or 10x) price to Chinese manufacturing. Cool.
We offered the Huck Tank as a reward tier on our Kickstarter campaign from six months ago. We’ve shipped out 80% of the MOSS kits from the kickstarter, and the remaining 20% are Huck Tank backers. I’m sorry we’re later than we estimated in the crowdfunding campaign! We expect to ship Huck Tanks in late October 2014, and I’m confident the wait will be worth it.
Every once in a while we talk to a teacher who needs to double check that Modular Robotics lesson plans, activities, and curricula are free. “Wait, you mean I can just download all of this stuff and use it in my classroom for free?” Indeed. We make our money selling tiny robots; it never actually occurred to us to charge for the other materials that make up our Education program. Free material is one thing, now we’re trying to make this stuff more free.
One of our international education resellers recently asked us if they could print out some of our activities and lesson plans, put their logo on the front, and use that as a special bonus to try and sell more Cubelets. A couple of us thought it was a weird request, a couple of us saw no problem with it. Discussion ensued.
Modular Robotics’ mission is to make the world a better place with thousands of tiny robots. Implicit in that is the notion that we want to have a really broad impact, that we want to enable as many kids as possible to use our robots to get a little smarter about the world. It seems to us like the distribution strategy around all of these materials should be one of openness, encouraging, and remixing, not one of restriction.
We figured that adopting a license would be the best idea for these materials so that the terms are out in the open. Instead of copyright, I’m proud to announce that all of Modular Robotics’ education materials like lesson plans, teacher training videos, curricula about complexity, engineering units and all future materials will be published with a Creative Commons Attribution-ShareAlike license.
 The CC BY-SA license is the same one used by Wikipedia. It means that you can use, remix, and modify the modbot education materials, and you can even sell the works that you create. But anything that you do end up creating that derives from this stuff must also carry this same license, and you have to give credit to Modular Robotics for the initial work. Remix!
The CC BY-SA license is the same one used by Wikipedia. It means that you can use, remix, and modify the modbot education materials, and you can even sell the works that you create. But anything that you do end up creating that derives from this stuff must also carry this same license, and you have to give credit to Modular Robotics for the initial work. Remix!
Chocolate Santa (an affectionate nickname for Tony, our UPS guy) just picked up the first 40 MOSS kits from our little factory at Modular Robotics. They’re headed out to our first 40 Kickstarter backers and thus, today marks an exciting milestone. After almost three years in development, we’re shipping the MOSS Robot Construction System! And it’s awesome.
Did you pledge on Kickstarter or pre-order for a MOSS Basic Builder Kit? Ho, ho! I have some good news for you. We decided to upgrade all Basic Builder Kits to the Zombonitron 1600 Kit. Extra parts! In addition to everything that was in the Basic Builder, you’ll get a Brightness Sensor, an extra Corner Block, two extra Double Spans, and 26 more Steel Spheres. In the months between the Kickstarter campaign and now, we’ve been building thousands of MOSS robots, and it turns out that these extra parts really expand the universe of robots that you can build with this kit.
 We had estimated that we’d be able to ship in February, and we’re finally opening the MOSS pipeline in the last days of March. If our delay screwed with your kid’s birthday or was annoying in another way, please accept my apology: I’m sorry we were late!
Honestly though, I’m blown away by how quickly and efficiently team Modbot moved to get MOSS from prototype to product. MOSS has hundreds of parts in it, most are completely custom, and we’re assembling and testing everything in our own shop in Boulder, CO. The complexity of this effort is astounding and I find myself extremely impressed that we’re shipping only a month or two late. Cubelets took a year longer than planned and every other physical gadget I’ve supported on Kickstarter has shipped with a far longer delay than MOSS.
Last week I ended up in Valdez, Alaska. It just happens to be the 25th anniversary of the oil spill, which I remember vividly watching and reacting to as a twelve year old. That event did a lot to shape the way that I think about the world, but that’s another story. Valdez is the end of the Trans Alaska pipeline, and seeing all of that infrastructure made me think a little bit about the Modular Robotics production pipeline that creates tiny robots and sends them out into the world. Over the last month we’ve been able to assemble some MOSS modules but we’ve been waiting on parts to assemble others. That creates a sort of MOSS reservoir at the beginning of the pipeline. In the last week, as we’ve finally been able to build the few remaining modules in the Zombonitron 1600 kit, we’ve been able to open the valve and start shipping. Right now it feels like we’re running only a trickle of water through our pipeline because we’re triple-testing everything and improving processes as we go. But we’ve designed our pipeline to hold thousands and thousands of tiny robots at a time, so it’ll be fun to watch the volume increase over the next few months.
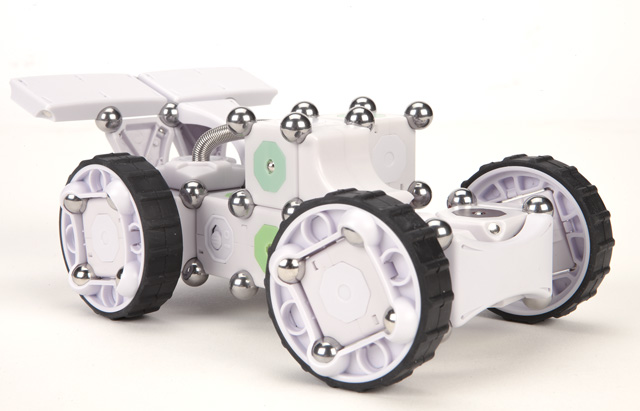
Kickstarter backers and pre-order friends, we’re amped to send out MOSS to you soon. We don’t have an exact schedule of who gets what when yet, but as our pipeline stabilizes a bit and we have enough data to project, we’ll post better delivery estimates here. For everyone else, we’ll have MOSS available on our web site as soon as we get the pre-orders out the door! In the meantime, here are a few MOSS robots to tide you over.
We had estimated that we’d be able to ship in February, and we’re finally opening the MOSS pipeline in the last days of March. If our delay screwed with your kid’s birthday or was annoying in another way, please accept my apology: I’m sorry we were late!
Honestly though, I’m blown away by how quickly and efficiently team Modbot moved to get MOSS from prototype to product. MOSS has hundreds of parts in it, most are completely custom, and we’re assembling and testing everything in our own shop in Boulder, CO. The complexity of this effort is astounding and I find myself extremely impressed that we’re shipping only a month or two late. Cubelets took a year longer than planned and every other physical gadget I’ve supported on Kickstarter has shipped with a far longer delay than MOSS.
Last week I ended up in Valdez, Alaska. It just happens to be the 25th anniversary of the oil spill, which I remember vividly watching and reacting to as a twelve year old. That event did a lot to shape the way that I think about the world, but that’s another story. Valdez is the end of the Trans Alaska pipeline, and seeing all of that infrastructure made me think a little bit about the Modular Robotics production pipeline that creates tiny robots and sends them out into the world. Over the last month we’ve been able to assemble some MOSS modules but we’ve been waiting on parts to assemble others. That creates a sort of MOSS reservoir at the beginning of the pipeline. In the last week, as we’ve finally been able to build the few remaining modules in the Zombonitron 1600 kit, we’ve been able to open the valve and start shipping. Right now it feels like we’re running only a trickle of water through our pipeline because we’re triple-testing everything and improving processes as we go. But we’ve designed our pipeline to hold thousands and thousands of tiny robots at a time, so it’ll be fun to watch the volume increase over the next few months.
Kickstarter backers and pre-order friends, we’re amped to send out MOSS to you soon. We don’t have an exact schedule of who gets what when yet, but as our pipeline stabilizes a bit and we have enough data to project, we’ll post better delivery estimates here. For everyone else, we’ll have MOSS available on our web site as soon as we get the pre-orders out the door! In the meantime, here are a few MOSS robots to tide you over.
 We had estimated that we’d be able to ship in February, and we’re finally opening the MOSS pipeline in the last days of March. If our delay screwed with your kid’s birthday or was annoying in another way, please accept my apology: I’m sorry we were late!
Honestly though, I’m blown away by how quickly and efficiently team Modbot moved to get MOSS from prototype to product. MOSS has hundreds of parts in it, most are completely custom, and we’re assembling and testing everything in our own shop in Boulder, CO. The complexity of this effort is astounding and I find myself extremely impressed that we’re shipping only a month or two late. Cubelets took a year longer than planned and every other physical gadget I’ve supported on Kickstarter has shipped with a far longer delay than MOSS.
Last week I ended up in Valdez, Alaska. It just happens to be the 25th anniversary of the oil spill, which I remember vividly watching and reacting to as a twelve year old. That event did a lot to shape the way that I think about the world, but that’s another story. Valdez is the end of the Trans Alaska pipeline, and seeing all of that infrastructure made me think a little bit about the Modular Robotics production pipeline that creates tiny robots and sends them out into the world. Over the last month we’ve been able to assemble some MOSS modules but we’ve been waiting on parts to assemble others. That creates a sort of MOSS reservoir at the beginning of the pipeline. In the last week, as we’ve finally been able to build the few remaining modules in the Zombonitron 1600 kit, we’ve been able to open the valve and start shipping. Right now it feels like we’re running only a trickle of water through our pipeline because we’re triple-testing everything and improving processes as we go. But we’ve designed our pipeline to hold thousands and thousands of tiny robots at a time, so it’ll be fun to watch the volume increase over the next few months.
Kickstarter backers and pre-order friends, we’re amped to send out MOSS to you soon. We don’t have an exact schedule of who gets what when yet, but as our pipeline stabilizes a bit and we have enough data to project, we’ll post better delivery estimates here. For everyone else, we’ll have MOSS available on our web site as soon as we get the pre-orders out the door! In the meantime, here are a few MOSS robots to tide you over.
We had estimated that we’d be able to ship in February, and we’re finally opening the MOSS pipeline in the last days of March. If our delay screwed with your kid’s birthday or was annoying in another way, please accept my apology: I’m sorry we were late!
Honestly though, I’m blown away by how quickly and efficiently team Modbot moved to get MOSS from prototype to product. MOSS has hundreds of parts in it, most are completely custom, and we’re assembling and testing everything in our own shop in Boulder, CO. The complexity of this effort is astounding and I find myself extremely impressed that we’re shipping only a month or two late. Cubelets took a year longer than planned and every other physical gadget I’ve supported on Kickstarter has shipped with a far longer delay than MOSS.
Last week I ended up in Valdez, Alaska. It just happens to be the 25th anniversary of the oil spill, which I remember vividly watching and reacting to as a twelve year old. That event did a lot to shape the way that I think about the world, but that’s another story. Valdez is the end of the Trans Alaska pipeline, and seeing all of that infrastructure made me think a little bit about the Modular Robotics production pipeline that creates tiny robots and sends them out into the world. Over the last month we’ve been able to assemble some MOSS modules but we’ve been waiting on parts to assemble others. That creates a sort of MOSS reservoir at the beginning of the pipeline. In the last week, as we’ve finally been able to build the few remaining modules in the Zombonitron 1600 kit, we’ve been able to open the valve and start shipping. Right now it feels like we’re running only a trickle of water through our pipeline because we’re triple-testing everything and improving processes as we go. But we’ve designed our pipeline to hold thousands and thousands of tiny robots at a time, so it’ll be fun to watch the volume increase over the next few months.
Kickstarter backers and pre-order friends, we’re amped to send out MOSS to you soon. We don’t have an exact schedule of who gets what when yet, but as our pipeline stabilizes a bit and we have enough data to project, we’ll post better delivery estimates here. For everyone else, we’ll have MOSS available on our web site as soon as we get the pre-orders out the door! In the meantime, here are a few MOSS robots to tide you over.
We’re making a lot of progress transitioning MOSS from prototype to product. Engineering design was locked several months ago, injection moulds are made, and plastics for our first production run (to fulfill kickstarter pledges) will arrive in Boulder this week. We’ve already started to produce circuit boards on our SMT fabrication line! Steel ball bearings are here and threaten to collapse our floor.
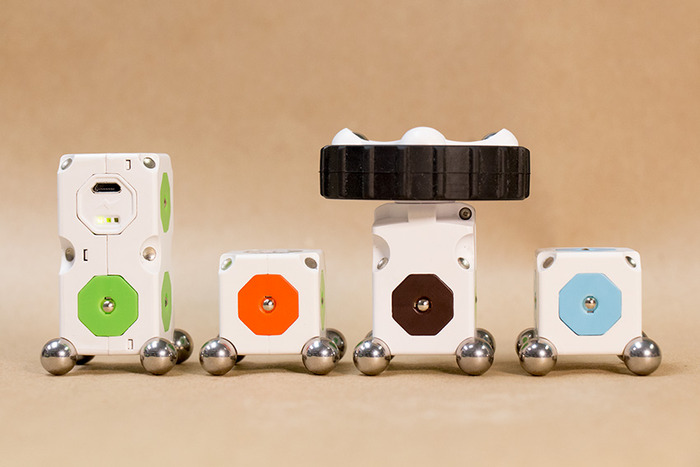
 Colors are locked, and they’re gorgeous. The photo below is a little wonky and still doesn’t show the colors accurately, but we just shot beautiful new pro photos and I’ll post them asap. We vacillated a lot with color selection, made a last-hour decision to switch to a two-color face scheme, and then reversed that in a last-minute decision to in favor of the original four-color face scheme:
Colors are locked, and they’re gorgeous. The photo below is a little wonky and still doesn’t show the colors accurately, but we just shot beautiful new pro photos and I’ll post them asap. We vacillated a lot with color selection, made a last-hour decision to switch to a two-color face scheme, and then reversed that in a last-minute decision to in favor of the original four-color face scheme:
 We’re still on track to get the first MOSS kits out the door in February!
We’re still on track to get the first MOSS kits out the door in February!
Colors are locked, and they’re gorgeous. The photo below is a little wonky and still doesn’t show the colors accurately, but we just shot beautiful new pro photos and I’ll post them asap. We vacillated a lot with color selection, made a last-hour decision to switch to a two-color face scheme, and then reversed that in a last-minute decision to in favor of the original four-color face scheme:
- Green = Power
- Red = Data Output
- Brown = Data Input
- Blue = Pass-through
We’re still on track to get the first MOSS kits out the door in February!
Well, now! That was fun. The Kickstarter campaign for MOSS ran for a month, attracted pledges from 1578 would-be robot builders, and generated $361,293.
Work on MOSS continues at full speed at Modular Robotics. All of our injection molded plastic parts are here, though some many of them need small changes. The colors are getting closer too! These whites are a little bit off and the face colors are a little dull and unsaturated, but you get the idea.
I wrote a couple of weeks ago about programming for MOSS. We had just gotten an explosion of attention from our launch on Kickstarter, and the alpha-geek, early-adopter community started asking about programming. I didn’t have a good answer, but since then, we’ve had some time to decide what we’ll build first. We just announced two programming tools as stretch goals for the campaign.
MOSS Flash. At a base level, we want our hacker friends to have full capability to reprogram, repurpose, and remix MOSS to accomplish whatever they want. The first thing we’re going to build is MOSS Flash, and it’s a desktop application that lets you reprogram the microcontroller inside any MOSS Bluetooth or MOSS Brain module in C. We’re not going to build an IDE yet, you can use whatever editor and file management tools you like, but you’ll be able to start with a few sample programs, modify them or write new ones, and just drag the files onto the super-simple MOSS Flash window to compile and reprogram a connected MOSS module via Bluetooth. We’ll probably build this in Node.js and much of the code is already written for our own use at modbot testing and debugging new MOSS programs. The code for basic functionality won’t be the hard part in building MOSS Flash, though. Documentation and designing the tutorials and materials that support open-ended programming will be hard, and building tools to help with debugging (regular C compiler output is often not particularly helpful) will be hard.
MOSS Scratch. With low-level access for the die hard programmers covered by MOSS Flash, we also want to create a second way to program MOSS robots, something higher-level that can serve as an entry point for young inventors or for those who don’t get off on semicolons. We picked Scratch, and we’ve already started working on a MOSS Scratch extension that will provide MOSS blocks that you can integrate with the normal Scratch blocks and a custom online compiler that will customize a Scratch script to run natively on the micro inside of a MOSS module. The mechanism for adding extensions to Scratch is in beta right now but it looks really promising and the Scratch team has expressed enthusiasm and support for the integration with MOSS. I think the progression of creating on-screen animations and then behaviors for a physical robot could be a pretty effective learning tool, and honestly, my mind is a little blown right now thinking of the cyclical nature of progress what with Grey Walter’s turtles, then Logo, then Scratch, and now back to robots.
Want to program your MOSS robots? Me too. We have some work to do building and testing these development tools, but we also have a pretty amazing engineering team. If the Kickstarter campaign hits the $564k mark, we’ll plan to have both of these tools ready in June 2014 and ideally we’ll put up a beta of MOSS Flash right around when we ship the first MOSS kits.
The cool thing about construction kits is that there are so many of them. A good construction kit abstracts something difficult away and lets kids build at a level that they wouldn’t normally be able to build at on their own. LEGO® abstracts away joinery, Erector Sets abstract away measurement, MOSS abstracts a lot of the complexity involved in kinematics, and Cubelets asbtract away the Sense, Think, and Act behaviors that make a robot.
Now, with these little adapter plates, you can combine the best parts of Cubelets and LEGO® to build robots that not only function, but do so with flair. They’re simple: little yellow plastic plates with a Cubelet connector on one side and a LEGO® connector on the other. From now through the end of the day on December 2, we’re including a free four-pack of Brick Adapters with every Cubelets order over $75.
It’s been a fun few days! We launched MOSS on Kickstarter on Thursday and hit the $100k goal in less than 12 hours. The pledges continue to roll in. We’ve been celebrating and a fair number of us are committed to a round of Car Bombs at every hundred thousand dollars.
We’re psyched, but not surprised. We picked $100k as a goal because we thought that we could hit it on the first day and that that success would be a whole story in itself. The whole point of launching on kickstarter was to make a broad impact. I’ll write about our decision to launch on kickstarter and the results later, though. Now I’d like to address software. Some people have asked about reprogramming MOSS modules. Please forgive my long-form answer.
There are a few “levels of play” with MOSS. Out of the box, people can snap modules and spheres together to build all sorts of reactive robots: robots that react to their environment by sensing and actuating.
With an iOS or Android device handy, kids can pair with a Bluetooth Module in a MOSS robot and control and communicate with their robot. By February, we’ll have the three first apps (all free) ready to use. MOSS Control is a panel of sliders that allows you to remote control (or remotely read data) on any of the 8 faces on the Bluetooth Module. MOSS Log can graph (and export) sensor values over time, and MOSS Etch is a drawing program that can use Knobs, Distance sensors, and other various modules as inputs.
Advanced users and older kids will hopefully want to reprogram their MOSS modules. And they will be able to! But we haven’t decided exactly how. At modbot, we all reprogram our MOSS Bluetooth modules by digging deep into C source code and sticking a little ISP header made from pogo pins onto an exposed PCB. But this is not the way to encourage kids to program.
For Cubelets, we exposed an API to enable people to reprogram in C, but on the level of “neighbors” and “sensors” instead of pin change interrupts and all of the nasty little bits that go along with microcontroller programming. We built Cubelets Code to reprogram from a browser window and Cubelets Studio as a standalone mac program. We’ve learned a lot from these experiments.
Yes, you will be able to reprogram MOSS modules by writing C code. But we haven’t decided what’s next from there. We’re thinking about the API and at what level people can best interact with MOSS. We’re playing with boxes and arrows languages like Max/MSP and block languages like Scratch. We’ve discussed open sourcing everything. We have a crazy idea about using Finite State Machines to program MOSS. We’ve thought about using Arduino. Should we virtual machine it? It’s super fun testing out all of the options as part of our design process for a programming system, but right now we don’t know exactly where it’s going to end up!
Oh, did you make it all the way to the end and get a little disappointed because there aren’t any robots here? I did too. How about this card conveying robot? It was Neville’s idea, Jon built it, and I get to show it off.
