There are a lot of different ways to build with Cubelets. Little kids, around 4 or 5, mostly like stacking them into tall towers and large constructions with flashing lights. Older kids usually build with more focus, snapping together mobile robots that avoid walls or beep when they’re being chased. Some people like remote-controlling their Cubelets robots with phones and tablets, and some people like integrating LEGO into their constructions. Super enthusiasts with a lot of patience have been able to reprogram Cubelets in C, unlocking unlimited functionality at the price of a steep learning curve.
Now, using brand-new Cubelets Blockly, anyone can learn to program Cubelets and take robot blocks to a completely different level. Blockly is a puzzle-piece programming language. You drag programming pieces around on the screen in an easy interface, but still with all of the power and expandability that text-based typing languages provide. Rad. Purists and alpha geeks may still wish to write C programs using Cubelets Flash, but most of us at modbot are tending to use Blockly since it’s so fast for prototyping and quickly exploring ideas.
I just opened up Blockly on my Mac and wrote a simple program: the Paper Towel Dispenser. An old standby. You know, wave your hand in front of the sensor and the motor turns on for a few seconds? It’s a super-simple version, but it worked on the first try! The program looks like this:
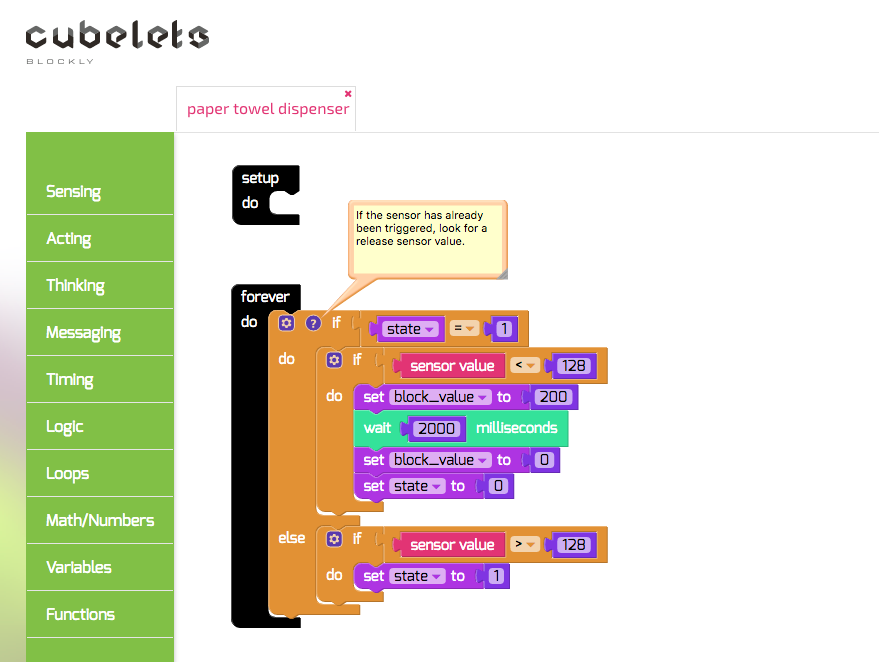
The program is written for a Distance Cubelet, so it monitors its distance sensor and then, when it detects a hand passing over it, sets its block_value to 200 for a couple of seconds. I decided to write my program for the Distance Cubelet so that I could line up as many Drive Cubelets as I want to be a little conveyor belt and not have to program any of them. I’m also dispensing a little aluminum ruler instead of paper towels, but that’s just a technicality.
It’d be easy to rewrite this program for a Drive Cubelet, and then I could stick on any type of Sensor Cubelet (not just Distance) and try to trigger the Drive.
Programming a whole pile of little robots instead of just one is an excellent way to see how there are often multiple ways to solve problems, and how small changes can have huge ripple effects in a complex system.
As I sit here enamored with my unimpressive ruler mover, Sam, our new Robotics Intern, is building a six-legged, catapult-equipped Cubelet/LEGO robot. And he just finished documenting a Cubelets paper football goalpost robot with three levels of gameplay which is pretty amazing.

Programming and interacting with a whole bunch of tiny robots is different from working with just one. Even though Cubelets Blockly is designed for kids, it contains some pretty advanced functionality. With a multi-robot system like Cubelets, blocks need to send messages around to other blocks and things are happening in parallel. We wrote a set of tutorials that highlights the key differences and walks you through building a few robots.
You’ll need a Bluetooth Cubelet and a few other Cubelets to play. Today, Blockly runs on Macs and PCs, and we’re going to be launching iOS, Android and Chromebook versions later this year.
Happy hacking; let us know if you build something cool!